- 根据波德定理,下列说法正确的是( )

- 二阶系统常被设计为( )

- 关于最佳二阶系统,下列说法正确的是( )

- 一阶系统的阶跃响应( )。
- 下列环节属于非最小相位系统的是( )

- 滞后校正的传递函数为( )
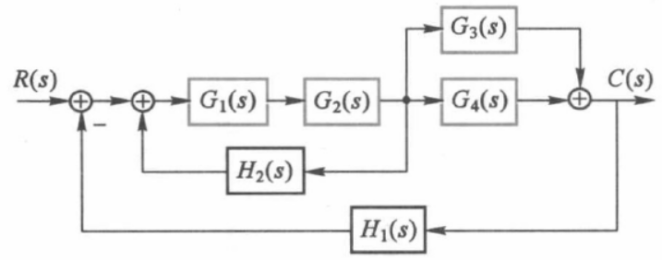
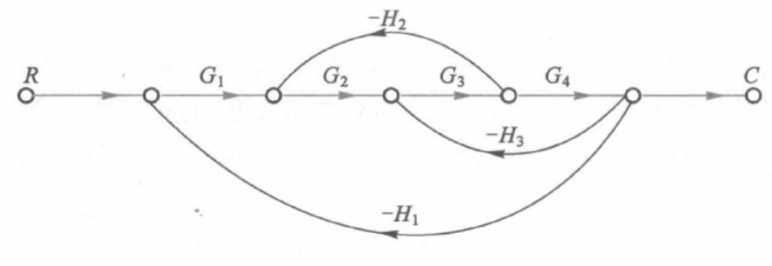
- 结构图主要用来( )。

- 如果输入信号为单位阶跃函数时,系统的稳态误差为有限值,则此系统为( )

- 二阶系统的特征根是实数还是复数,取决于( )
- 超前校正的转折频率在复平面上的分布为( )


- 传递函数可用于处理( )

- 若保持二阶系统的阻尼比不变,提高无阻尼自然振荡频率,则( )



- 绘制根轨迹时,增加开环零点,可导致( )

- 超前校正的传递函数为( )
- 传递函数可用来表述线性时变系统。( )


- 应用终值定理法计算稳态误差时,需满足sE(s)在[s]平面右半边及虚轴上(除原点外)没有极点这一条件。( )
- 处理高阶系统时,主导极点均位于复平面左半边,且远离虚轴。( )

- 闭环系统的优点是系统稳定,但控制精度低。( )
- 为计算单位阶跃输入下的稳态误差,需计算( )
- 控制系统在工作中受到参考输入和扰动输入共同作用时,输出结果等于二者分别作用于系统产生的输出之和。( )
- 根据伯德定理,要求控制系统伯德图的中频段斜率为-20dB/dec。( )
- 若系统稳定,则其特征方程的系数同号且不为零。( )
- 根轨迹时对称于实轴的连续曲线,分支数等于开环有限极点数与有限零点数之差。( )
- 依据劳斯判据,辅助方程的最高次幂都是偶数。( )

- 绘制根轨迹时,两条根轨迹在分合点相遇再离开时遵循右转法则。( )
- 线性系统在实际中大量存在,所以线性系统理论被学者深入研究。( )
- 微分环节在实际系统中,不能单独存在。( )
- 对于零度根轨迹而言,在实轴上的根轨迹是那些在其右侧开环实极点和实零点的总数为偶数的线段。( )
- 滞后校正的零极点尽量靠近中频段,可减小相角滞后。( )
- 滞后校正的零极点离得越远,滞后相角越小。( )
- 校正环节安置在前向通道的形式称为串联校正,一般串联校正装置会安置在前向通道的后端。( )
- 滞后校正利用高频幅值衰减特性,而并非相角滞后特性。( )
- 超前校正作用下,最大超前相角只与参数a有关。( )
- 奈奎斯特曲线刚好穿过(-1, j0)点时,系统临界稳定。( )

- 频率特性函数仅适用于稳定系统,并不适用于不稳定系统。( )
- 由惯性环节的伯德图可以看出,它具有低通滤波特性。( )
- 伯德图是全对数坐标图,即横纵坐标均按对数刻度划分。( )
- 控制系统的稳定性取决于闭环极点,动态相应也与极点相关。( )
- 绘制零度根轨迹时,如果实轴上某线段右侧的开环实数零、极点个数和是奇数时,此线段是根轨迹。( )
- 根轨迹的两条分支相遇分开时,遵循左转法则。( )
- 常规根轨迹起于开环极点,终于开环零点或无穷远点。( )
- 根轨迹可用于分析系统的稳定性,但不能用来分析系统的响应特性。( )
- 对于一阶系统而言,时间常数T反映了系统的惯性,T越大,系统的惯性越大。( )
- 一般情况下,我们会将二阶系统设计成( )

- 常见的典型输入信号包括( )
- 系统型号越高越容易稳定,因此设计系统时,可尽可能地提高型号。( )
- 如果闭环系统特征方程系数均大于零,则系统是稳定的。( )
- 传递函数适用于非线性定常系统。( )
- 列写系统微分方程步骤包括( )
- 线性控制系统的最终输出结果应是参考输入和扰动输入分别作用于系统,产生的输出信号之和。( )
- 自动控制依然需要人直接参与。( )
- 分布参数系统多由常微分方程表述。( )。
- 集中参数系统可看做由无穷多个无穷小的部件组成。( )
- 数字计算机本身是一个离散系统。( )。
答案:开环对数幅频特性的中频段斜率为-20dB/dec时,系统不稳定
答案:

答案:欠阻尼
答案:

答案:欠阻尼
答案:
答案:

答案:无超调
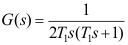
答案:滞后环节
答案:45°
答案:
温馨提示支付 ¥3.00 元后可查看付费内容,请先翻页预览!