- 关于子结构分析法与矩阵位移法,下列表述不正确的是( )
- 图示无侧移结构,已知D支座发生角位移θ,欲利用多结点力矩分配法的改进技术进行计算,约束状态下对应固端弯矩为零的杆件为( )
- 图示四跨连续梁,利用多结点力矩分配法改进技术分析,下面说法不正确的是( )
- 图示结构,设各杆长度均为L,已知K支座发生下沉⊿,欲利用多结点力矩分配法的改进技术进行计算,约束状态下,固端弯矩正确的是为( )
- 图示无侧移结构,内部含有六个刚结点情况,虚线表示B、G两结点以及C、F两结点通过杆件相连接,利用多结点力矩分配法改进技术分析,下面说法不正确的是( )
- 图示八跨连续梁,内部含有七个刚结点情况,放松七个结点时分组情况为( )
- 图示结构,设各杆长度均为L,已知D支座发生水平位移⊿,E支座发生角位移θ,欲利用多结点力矩分配法的改进技术进行计算,约束状态下固端弯矩正确的为( )
- 图示四跨连续梁,内部含有三个刚结点情况,放松三个结点时分组情况为( )
- 图示有侧移结构,欲转换成形式上的无侧移结构,技术处理方法是( )
- 图示无侧移结构,已知D支座发生角位移θ,欲利用多结点力矩分配法的改进技术进行计算,约束状态下,固端弯矩正确的是为( )
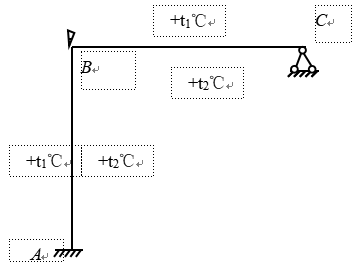
- 图示结构,发生温度改变如图所示,约束状态需要考虑相邻杆伸长或缩短产生附加固端弯矩的杆件是( )
- 计算图示超静定刚架结构,下面哪种方法需要建立方程与求解方程( )
- 图示无侧移结构,设C 支座发生支座位移,计算约束状态下AB杆件的固端弯矩,下列说法不正确的( )
- 图示结构,发生温度改变如图所示,约束状态需要考虑相邻杆伸长产生附加固端弯矩的杆件是( )
- 图示六跨连续梁,内部含有五个刚结点情况,放松五个结点时分组情况为( )
- 关于多结点力矩分配法,下列描述不正确的是( )
- 图示结构,已知K支座发生下沉⊿,欲利用多结点力矩分配法的改进技术进行计算,约束状态下对应固端弯矩为零的杆件为( )
- 结构位移计算中需要已知杆件的( )
- 图示结构,已知D支座发生水平位移⊿,E支座发生角位移θ,欲利用多结点力矩分配法的改进技术进行计算,则施加约束力矩增量的结点为( )
- 多结点力矩分配法改进技术与子结构分析法联合应用计算大型复杂有侧移结构,基本未知量为( )
- 图示有侧移结构,施加约束转化成形式上的无侧移结构后,放松B结点约束C结点时,BE杆件的传递系数为( )
- 图示有侧移结构,施加约束转化成形式上的无侧移结构后,放松B结点约束C结点时,BC杆件在近端B的分配系数为( )
- 图示AB单跨梁,长度为L,B端发生单位下沉,设其线刚度为i ,则A截面的固端弯矩为( )


- 图示有侧移结构,施加约束转化成形式上的无侧移结构后,放松C结点约束B、D结点时,CB杆件在近端C的转动刚度为( )
- 超静定刚架结构,已知杆件的绝对刚度,利用多结点力矩分配法改进技术计算得到的杆端弯矩和结点位移为( )
- 图示有侧移结构,施加约束转化成形式上的无侧移结构后,放松C结点约束B、D结点时,CB杆件在近端C的分配系数为( )


- 图示有侧移结构,施加约束转化成形式上的无侧移结构后,放松B结点约束C结点时,BC杆件的传递系数为( )
- 图示有侧移结构,施加约束转化成形式上的无侧移结构后,放松B结点约束C结点时,BE杆件在近端B的分配系数为( )


- 图示结构,发生温度改变如图所示,BC杆缩短对AB杆产生的垂直于杆轴线方向的相对线位移( )
- 图示有侧移结构,施加约束转化成形式上的无侧移结构后,AB杆件在近端B的分配系数为( )。
- 多结点力矩分配法改进技术与子结构分析法联合应用计算大型复杂有侧移结构,建立基本未知量方程,需要( )

- 无侧移结构,内部含有六个刚结点组成闭口图形情况,放松结点时施加的约束力矩增量数目为3个。
- 有侧移结构施加约束转化成无侧移结构后,无侧移结构上的荷载包括两类,一是原有侧移结构上的已知荷载,二是强迫施加约束发生的相应的侧移。
- 与经典的力矩分配法比较,多结点力矩分配法的改进技术对转动刚度、传递系数以及分配系数的确定方法做了不同的修改。
- 将支座位移看作广义荷载后,超静定结构在支座位移作用下的计算过程与一般外力作用下的计算过程完全相同。
- 超静定结构若承受温度均匀的降低,结构中杆件上不存在固端弯矩。
- 无侧移结构,内部含有四个刚结点组成闭口图形情况,首尾结点之间进行力矩的分配与传递。
- 利用多结点力矩分配法改进技术分析某子结构,若子结构内部含有三个刚结点,需要在放松约束状态的后半个循环施加一个约束力矩增量进行计算。
- 有侧移结构施加约束转化成无侧移结构后,需要按照无侧移结构计算结点的分配系数。
- 多结点力矩分配法的改进技术关于转动刚度、传递系数以及分配系数的确定方法与经典的力矩分配法保持不变。
- 多结点力矩分配法的改进技术,在放松约束状态的前半个循环施加了约束力矩增量,并参与力矩分配与传递。
- 利用多结点力矩分配法改进技术分析某子结构,可根据子结构内部刚结点的个数不同在约束状态施加不同数目的约束力矩增量。
- 结构位移的计算次序是依次计算第一类、第二类、第三类等杆件端部结点的未知位移,从结构内部到结构外部逐渐计算位移。
- 子结构分析法由于划分的单元大小不一,不易于编写标准化的电算程序,不适合于电算。
- 结构属于有侧移结构还是无侧移结构,仅仅取决于结构的计算简图,与温度改变没有关系。
- 采用多结点力矩分配法的改进技术,放松约束时需要将结构内部的结点划分成两组。
- 多结点力矩分配法的改进技术,提前施加的约束力矩增量大小取决于内部结点在放松约束状态的约束力矩以及结点的分配系数。
- 将温度改变看作广义荷载后,超静定结构在温度改变下的计算过程与一般外力作用下的计算过程完全相同。
- 有侧移结构施加约束转化成无侧移结构后,需要按照无侧移结构确定杆件的转动刚度与传递系数。
- 有侧移结构与无侧移结构的计算过程不同,计算过程中需要考虑平衡条件建立关于未知侧移的方程与并求解侧移。
- 改进以后的力矩分配法,其突出的优点为:不管单结点还是多结点情况,内部每个结点只放松传递一次得到了杆端弯矩的精确解。
- 结构位移计算中,第二类杆件一般为通过支座与基础直接相联接的杆件,即外部杆。
- 结构位移计算中需要划分杆件类别,第一类为外部杆件,第二类为内部杆件。
- 超静定刚架在支座位移作用下,内力大小取决于相对刚度,位移大小取决于绝对刚度。
- 计算超静定刚架结构的位移,下面表述不正确的是( )。
- 根据多结点力矩分配法改进技术计算得到的杆端弯矩计算结构内部结点的位移,主要是因为杆端弯矩为精确值,因此计算的位移也为精确值。
- 超静定刚架在一般荷载作用下,内力大小取决于相对刚度,位移大小取决于绝对刚度。

- 结构位移的计算次序是依次计算第三类、第二类、第一类等杆件端部结点的未知位移。
- 结构位移计算中需要已知各杆件的( )。

- 子结构分析法计算大型复杂无侧移结构,基本未知量是拆分结点处的未知角位移。
- 多结点力矩分配法改进技术与子结构分析法联合应用,基本未知量为( )。
- 多结点力矩分配法改进技术与子结构分析法联合应用,建立基本未知量方程,需要( )。
- 利用多结点力矩分配法改进技术分析某子结构,可根据子结构内部刚结点的个数不同将结点划分成不同的组数。
- 多结点力矩分配法改进技术与子结构分析法联合应用,杆端弯矩的计算结果为近似值。
- 设拆分成的某子结构属于无侧移结构,内部含有5个刚结点,利用多结点力矩分配法改进技术计算时,需要施加的约束力矩增量个数为( )。
- 关于子结构分析法,下列表述正确的是( )。
- 子结构分析法,若子结构只含有一根杆件,可利用杆件的刚度方程建立杆端弯矩与未知量之间的关系。
- 子结构分析法计算大型复杂有侧移结构,基本未知量只考虑拆分结点处的未知线位移。
- 关于子结构分析法与矩阵位移法,下列表述不正确的是( )。


- 温度改变作用下,由于杆件随温度改变产生伸长或缩短,结构类型都属于有侧移结构。
- 支座位移作用下,结构类型都属于有侧移结构。

- 支座位移作用下,约束状态杆件的固端弯矩就是杆件由于已知杆端位移产生的杆端弯矩。

- 支座位移作用下,无侧移结构计算过程不需要建立方程与求解方程。
- 温度改变作用下,有侧移结构计算过程需要考虑结点的力矩平衡条件计算侧移的大小。
- 图示无侧移结构,设C支座发生支座位移,约束状态下CD杆件的固端弯矩是由下列哪些荷载产生的( )。
- 图示有侧移结构,施加约束转化成形式上的无侧移结构后,AB杆件在近端B的转动刚度为( )。
- 有侧移结构与无侧移结构的计算过程一样,计算过程中均不需要建立与求解方程。

- 计算有侧移结构的侧移,一般需要考虑结点的力矩平衡方程。

- 多结点力矩分配法改进技术计算有侧移结构时,对应的侧移转化为无侧移结构中发生了相应的支座位移。
- 多结点的有侧移结构转化成无侧移结构后,可按照多结点力矩分配法的改进技术进行杆端弯矩精确值的计算。

- 多结点力矩分配法改进技术可以直接应用于有侧移结构的计算。
- 无侧移结构,内部含有六个刚结点情况,放松结点时,结点分组数目为3组。
- 无侧移结构,内部含有六个刚结点组成开口图形情况,施加的约束力矩增量数目必须与结点的分组数目相同。
- 无侧移结构多结点力矩分配法改进技术,前后计算过程的正确顺序为( )。
- 无侧移结构,内部含有两个刚结点情况具体的改进技术为( )。
- 无侧移结构,内部含有四个刚结点情况,放松结点时施加的约束力矩增量数目为( )。
- 无侧移结构,内部含有七个刚结点情况,放松结点时施加的约束力矩增量数目为3个。
- 无侧移结构,内部含有四个刚结点组成闭口图形情况,首尾结点之间只进行力矩的分配但不传递。
- 无侧移结构内部含有两个刚结点情况,若同时放松内部的两个结点,将不能确定下列哪些参数( )。
- 无侧移结构,内部含有三个刚结点情况,放松三个结点时分组情况为( )。
- 经过改进技术,力矩分配法实现了完美统一,表现为不管单结点还是多结点情况,内部每个结点只放松传递一次得到了精确解。
- 单结点力矩分配法,若结点上仅仅作用一力偶,该力偶可直接分配得到近端和远端的弯矩,该力偶没有正负号的规定。
- 力矩分配法,结点放松一次后,再次放松时其约束力矩为结点上新的传递弯矩之和。
- 力矩分配法第二步为约束状态,主要工作是计算固端弯矩和约束力矩。
- 经典的多结点力矩分配法,随着计算循环次数增加,结点上的约束力矩会逐渐趋向零。
- 放松约束状态时,下面哪个参数变号后进行力矩的分配与传递( )。
- 经典的力矩分配法,关于杆端弯矩得到的解为( )。
- 分配系数用于计算近端弯矩,传递系数用于计算远端弯矩。
- 下面三个参数中,哪些参数根据远端支座情况可以直接确定大小( )。
- 多结点力矩分配法放松约束状态时,采取的措施是( )。
- 计算超静定结构经典的方法中,下面哪种方法不需要建立方程与求解方程( )。
- 本门在线开放课程属于新开发课程,建课目标是推进优质教学资源的共享。
答案:子结构分析法较矩阵位移法划分的单元数目多###子结构内部不可以只包含一个刚结点###子结构不可以是一根独立的杆
答案:EF杆###FL杆###EK杆
答案:在B结点施加约束力矩增量###任意一个结点上都可以###在D结点施加约束力矩增量
答案:
答案:在B、C、D结点各自施加约束力矩增量###任意三个结点各自施加约束力矩增量###在C、D、E结点各自施加约束力矩增量
答案:结点C、E、G为第一组###结点B、D、F、H为第二组
答案:
答案:中间的一个结点C为第一组###左右不相邻的两个结点B、D为第二组
答案:可以在结点E施加水平链杆###可以在结点B施加水平链杆
答案:
答案:BC杆###BD杆###AB杆
温馨提示支付 ¥5.00 元后可查看付费内容,请先翻页预览!

