第四章单元测试
- Arduino UNO开发板上自带一个LED灯,它连接到数字引脚( )。
- 下面属于Arduino开发板是( )。
- 下图是Mixly软件的界面,红色方框中的图标对应的功能是( )。

- 电机采用L298N驱动电路,要控制电机正反转,可以通过交换输入端(IN1和IN2、IN3和IN4)接入的电平高低值(1或0)实现。( )
- 假设电机已接入L298N的输出A端,IN1端口连接到Arduino开发板的11号引脚,IN2连接到10号引脚,使能端ENA连接到9号引脚,则下面的程序块功能是( )。

- 声音传感器模块有3个引脚,VCC代表正极,GND代表负极,OUT代表输出端。( )
- 下面哪一个运算符不可用于“关系”表达式中?( )
- 在Mixly中要构成“如果…执行…否则…”语句,正确的操作步骤是( )。
- 如果需要机器人向前行驰,需要( )。
- 如果需要机器人向左行驰,需要( )。
- 台式计算机一般都提供串行通信接口,其默认的波特率为( )。
- 超声波传感器模块中的那一个引脚用于发射超声波( )。
- 串口通信语句块位于Mixly的( )模块中。
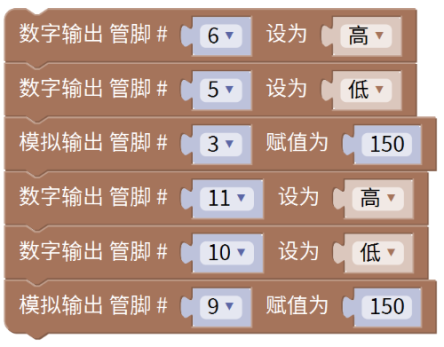
- 假设左侧电机已接入L298N的输出A端,IN1端口连接到Arduino开发板的11号引脚,IN2连接到10号引脚,使能端ENA连接到9号引脚; 右侧电机已接入L298N的输出B端,IN3端口连接到Arduino开发板的6号引脚,IN4连接到5号引脚,使能端ENB连接到3号引脚,下面哪一个程序块可以使机器人以150的速度向后行驰( )。
- 机器人小车右轮不动,左轮前进,将向左转。( )
- 在Mixly中要产生随机数,需要先添加“初始化随机数”语句”。( )
- QTI传感器是将红外发射器和红外接收器集成封装在一起的传感器。( )
- QTI传感器当检测到黑色的表面时,SIG信号线输出低电平,当检测到白色的表面时,SIG信号线输出高电平 。( )
- 假设在机器人小车前方采用两个QTI传感器进行循迹,左侧QTI的SIG引脚连接到Arduino开发板的13号引脚,右侧QTI的SIG引脚连接到Arduino开发板的12号引脚,如果下面的程序块成立,则说明( )。

- 下图所示的语句块位于Mixly的( )模块中。

A:14 B:12 C:0 D:13
答案:13
A:ATmega B:Leonardo C:Nano D:Mega
A:程序块居中 B:程序块放大 C:复制程序块 D:运行程序块
A:错 B:对
A:使电机以150的速度顺时针旋转 B:由于两个引脚的状态冲态,电机将无法旋转 C:使电机以150的速度逆时针旋转 D:由于9号引脚设置的是模拟输出管脚,程序将无法通过编译
A:错 B:对
A:≤ B:> C:!= D:=
A:从控制模块中拖拽“否则”模块到“如果…执行…”语句下方。 B:左键单击“如果…执行…”语句,在弹出的菜单中选择“添加否则”语句。 C:点击“如果…执行…”语句左上方的蓝色小螺帽,将弹出的“否则”语句块拖拽到“如果”里面。 D:直接从控制模块中拖拽“如果…执行…否则…”模块到代码区。
A:左轮和右轮都顺时针旋转 B:左轮逆时针旋转,右轮顺时针旋转 C:左轮顺时针旋转,右轮逆时针旋转 D:左轮和右轮都逆时针逆转
A:左轮和右轮都逆时针逆转 B:左轮逆时针旋转,右轮顺时针旋转 C:左轮和右轮都顺时针旋转 D:左轮顺时针旋转,右轮逆时针旋转
A:9600 B:1800 C:4800 D:2400
A:Trig B:Echo C:Vcc D:Gnd
A:通讯模块 B:串口模块 C:控制模块 D:输入/输出模块
A:
 B:
B: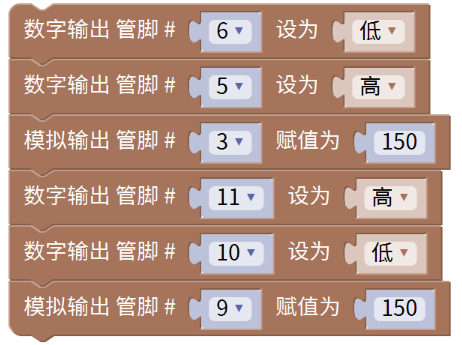 C:
C: D:
D:
A:错 B:对
A:对 B:错
A:对 B:错
A:错 B:对
A:机器人小车在黑线正上方行驶 B:机器人小车的行驶方向反了 C:机器人小车向左偏了 D:机器人小车向右偏了
A:工具模块 B:输入/输出模块 C:逻辑模块 D:控制模块
温馨提示支付 ¥3.00 元后可查看付费内容,请先翻页预览!

