1.机器人一定是人型的。 ( )
A:错
B:对
答案:错
2.QTI传感器当检测到黑色的表面时,SIG信号线输出高电平,当检测到白色的表面时,SIG信号线输出低电平。( )
A:对
B:错
答案:错
3.Arduino开发板上的所有端口都可以输出模拟信号。( )
A:对
B:错
答案:错
4.一般情况下,面包板中间区域竖向每5个孔是相互导通的,横向的孔之间不相互导通。( )
A:对
B:错
答案:对
5.VEX机器人工程挑战赛是一项国际青少年机器人比赛项目,每年设置一个主题。( )
A:错
B:对
答案:对
6.在Scratch中的程序中,只能有一个“当小绿旗单击”代码块。( )
A:对
B:错
答案:错
7.电机采用L298N驱动电路,要控制电机转速,使能端只能接入Arduino开发板上标有"~"的6个引脚。( )
A:错
B:对
答案:对
8.函数可以把功能相同或相似的代码放在一起,在需要时,调用编好的函数,就可以实现相应的功能。这样可以避免编写重复代码。( )
A:错
B:对
答案:对
9.机器人小车左轮不动,右轮前进,将向左转。( )
A:对
B:错
答案:对
10.PWM是指通过占空比的方式来改变平均电流,从而使电机的转速发生改变。( )
A:错
B:对
答案:错
11.关于条件分支语句的说法,正确的有哪些?( )
A:三分支条件语句
B:单分支条件语句
C:双分支条件语句
D:无分支条件语句
A:改变输入端(IN1和IN2、IN3和IN4)的电流高低值 B:改变使能端(ENA或EN C:L298N驱动电路无法调节电机转速 D:的PWM值B. 改变输入端(IN1和IN2、IN3和IN4)的电压高低值 13.如果需要机器人向右行驰,需要( )。
A:左轮和右轮都顺时针旋转 B:左轮和右轮都逆时针逆转 C:左轮逆时针旋转,右轮顺时针旋转 D:左轮顺时针旋转,右轮逆时针旋转 14.下面哪个不是机器人系统的基本结构?( )
A:计算机控制系统 B:传感系统 C:人 D:机械本体 15.随机数产生模块位于Mixly的( )模块中。
A:变量模块 B:控制模块 C:数学模块 D:逻辑模块 16.在机器人历史上,被称为“工业机器人之父”的是 ( )。
A:英格伯格 B:弗里茨 C:诺伯特 D:阿西莫夫 17.超声波传感器模块中的那一个引脚用于接收返射回来的反射波( )。
A:Gnd B:Echo C:Trig D:Vcc 18.世界首台带有人工智能的移动机器人的名字是什么?( )
A:Handy B:Dante C:shakey D:Topping 19.工业机器人出现是在( )世纪。
A:20 B:19 C:21 D:18 20.超声波的声音的频率为( )。
A:低于20KHZ B:20HZ到20KHZ之间 C:高于20KHZ D:低于20HZ 21.机器人的出现对于人类的意义是( )
A:机器人可以帮助我们完成一些危险的工作。 B:微型机器人在医学领域对人类的帮助很大。 C:大型工业机器人可以帮助人类完成很多沉重的工作。 D:可以完全解决人类,从此不需要人类工作了。 22.
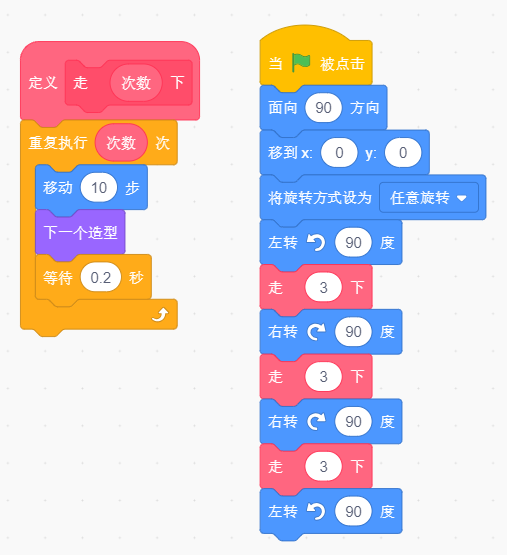 点击绿旗,小猫运行完这段程序后的状态,正确的是:( )
点击绿旗,小猫运行完这段程序后的状态,正确的是:( )A: B: C: D: 23.
 运行这段程序后,角色说的结果是( )。
运行这段程序后,角色说的结果是( )。 A:210 B:200 C:201 D:10 24.
 运行这段程序后,角色的x坐标是( )。
运行这段程序后,角色的x坐标是( )。 A:20 B:10 C:100 D:50 25.下面的代码执行后的结果是( )。
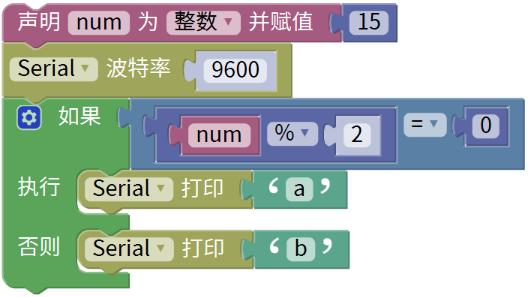
A:向Arduino开发板输出’a’ B:在串口监视器中输出’a’ C:向Arduino开发板输出’b’ D:在串口监视器中输出’b’ 26.
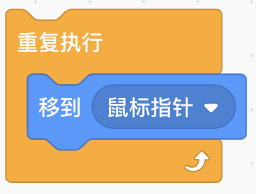 运行这段代码后,会出现什么效果?( )
运行这段代码后,会出现什么效果?( )A:当前角色跟着鼠标移动 B:鼠标指针按之前设定的规律移动 C:鼠标跟着当前角色移动 D:当前角色按之前设定的规律移动 27.假设左侧电机已接入L298N的输出A端,IN1端口连接到Arduino开发板的11号引脚,IN2连接到10号引脚,使能端ENA连接到9号引脚; 右侧电机已接入L298N的输出B端,IN3端口连接到Arduino开发板的6号引脚,IN4连接到5号引脚,使能端ENB连接到3号引脚,下面哪一个程序块可以使机器人以150的速度向右行驰( )。
A: B: C: D: 28.下列哪个程序块可以让与Arduino开发板2号引脚和4号引脚相连的LED交替闪烁( )。
A: B: C: D: 29.
 小猫角色运行完这段程序后,小猫在舞台上的状态是( )。
小猫角色运行完这段程序后,小猫在舞台上的状态是( )。 A: B: C: D: 30.假设低电平有效的声音传感器口连接到Arduino开发板的A0号引脚,下面能判定有声音有语句块是( )。
A: B: C: D: 31.
 这个代码块的功能是( )
这个代码块的功能是( )A:将当前对象标移动-230到230之间的任值 B:将当前对象标移动10到170之间的任值 C:将当前对像移动到随机位置 D:将当前对象的x坐标移动-230到230之间的任值,y坐标移动10到170之间的任值 32.下面语句块的作用是( )。
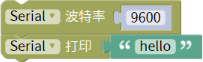
A:在串口监视器中打印“hello”一次 B:向Arduino开发板输出一次“hello” C:在串口监视器中循环打印“hello” D:向Arduino开发板循环输出“hello” 33.下列哪几段代码执行后小猫的X坐标是50,Y坐标是-100?( )。
A: B: C: D:
温馨提示支付 ¥3.00 元后可查看付费内容,请先翻页预览!

