- 对自动控制系统的基本要求可以概括为三个方面,即:稳定性、快速性和准确性。( )
- 采用计算机实现连续控制器,需考虑将计算机运算出来的离散控制量恢复为连续信号,这可通过一阶保持器来实现。( )
- 自动控制系统按输入量的变化规律可分为恒值控制系统、随动控制系统与程序控制系统。( )
- 闭环控制系统又称为反馈控制系统。( )
- 应用劳斯判据判断系统稳定性,劳斯表中第一列数据全部为负数,则系统稳定。( )
- 在经典控制理论中主要采用的数学模型是微分方程、传递函数、结构框图和信号流图。( )
- 在工程上,离散时间系统的采样时间取得越小越好。 ( )
- 闭环带宽wb越大,闭环系统的快速性越好,但抗干扰能力下降。( )
- 离散时间系统的分析与设计中,离散化的手段包括( )。
- 方框图化简时,并联连接方框总的输出量为各方框输出量的( )
- 线性系统的频率特性( )

- 决定系统传递函数的是系统的( )
- 单输入单输出的线性系统其传递函数与下列哪些因素有关( )
- 下面属于现代控制理论的是( )。
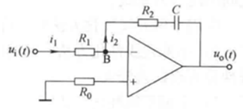
- 描述RLC电路的线性系统的阶次为( )
- 在用实验法求取系统的幅频特性时,一般是通过改变输入信号的()来求得输出信号的幅值( )
- 在直流电动机调速系统中,霍尔传感器是用作( )反馈的传感器。
- 对连续被控对象频率特性,最接近它的离散开环频率特性的表示方式为( )
- 下列哪个开环系统对应的闭环系统不稳定( )。
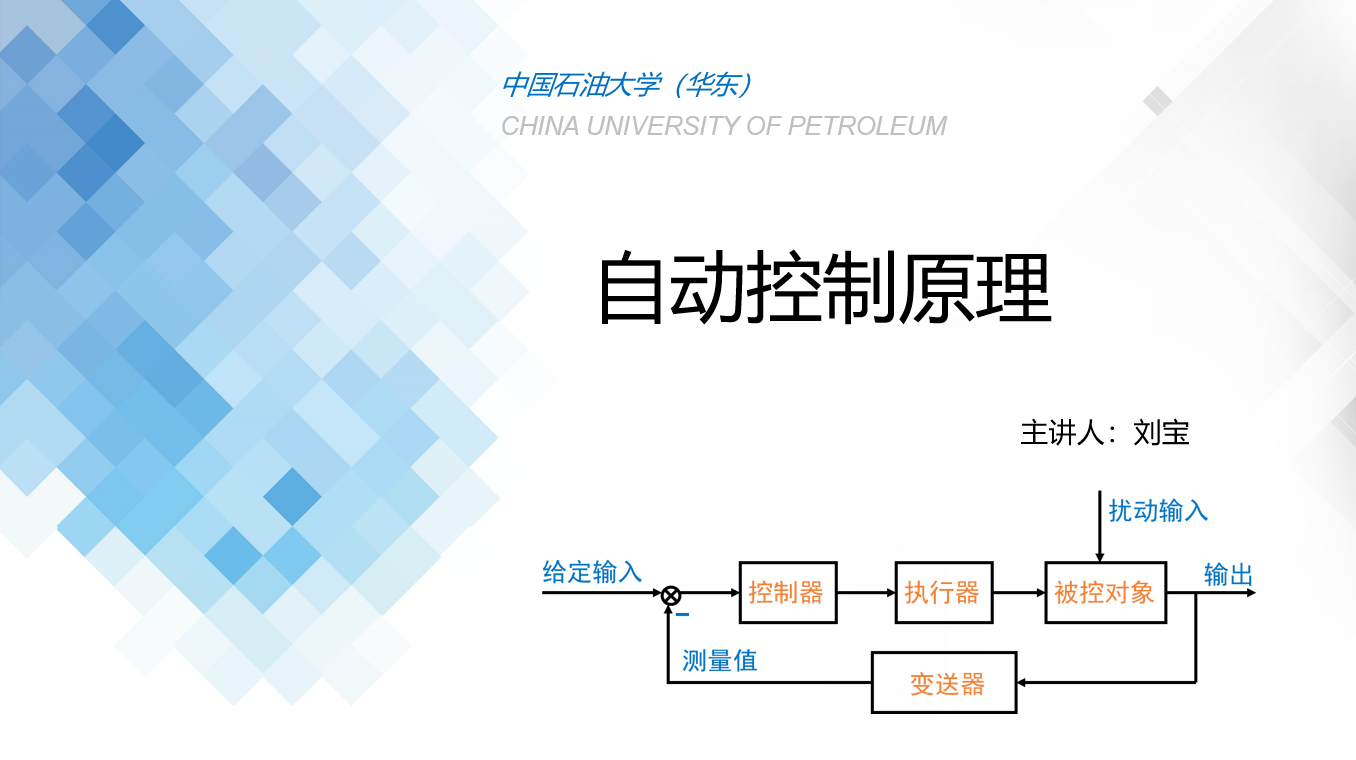
- 通过测量输出量,产生一个与输出信号存在确定函数比例关系值的元件称为( )。
- 闭环系统的动态性能主要取决于开环对数幅频特性的( )

- 典型二阶系统的超调量越大,反映出系统( )
- 开环对数频率特性低频段决定系统的( )
- 惯性环节和积分环节的频率特性在( )上相等。


- 线性定常系统传递函数的变换基础是( )
- 一般为使系统有较好的稳定性,希望相位裕量g为( )


- 零阶保持器不是零相位,会给系统带来额外的滞后相位。( )



- 关于系统频域校正,下列观点错误的是( )。
- 下列哪种措施对提高系统的稳定性没有效果( )。
- 引入串联滞后校正将使系统稳态误差较小。( )
- 闭环系统的稳定性、超调量、瞬态过程时间都是与闭环极点位置有关。( )
- 频段分解分析具有很好的物理含义,每个频段担负的功能各异,某种意义上实现“功能解耦”分析。( )
- I型系统的开环幅相频率特性曲线起始于( )。
- 若开环传递函数在右半s平面上有P个极点,则当ω由0变到+∞时,如果开环频率特性的轨迹在复平面上逆时针围绕(-1,j0)点转( )圈,系统是稳定的,否则,系统是不稳定的。
- 一阶微分环节的对数幅频特性和相频特性与惯性环节的相应特性互以( )为镜像。
- 根轨迹法是一种( )。
- 采用劳斯判据可以快捷地判断闭环系统的稳定性。( )
- 线性定常二阶系统的闭环增益加大,则有( )
- 系统在r(t)=t2作用下的稳态误差ess=∞,说明( )。
- 在开环系统中增加积分因子( )。

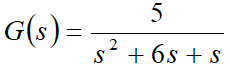
- 系统输出量的拉氏变换与输入量的拉氏变换之比,称为系统的传递函数。( )
- 自动控制系统的数学模型包括( )。
- 惯性环节的数学模型( )。
- 要实现高性能的反馈调节还需要进行深入的理论研究,确保控制系统做到“稳、准、快”。( )
- 开环控制方式是按____进行控制的,反馈控制方式是按____进行控制的。( )
- 自动控制系统的_____是系统正常工作的先决条件( )
- 系统的可控能力与被控对象和控制器无关。( )
- 只要系统稳定,控制偏差就会收敛,系统输出总能跟上期望值;若系统不稳定,控制偏差不会收敛,系统输出将发散,控制任务将无法完成。( )
- 传递函数是物理系统的数学模型,但不能反映物理系统的性质,因此不同的物理系统不能有相同的传递函数。( )
答案:对
答案:对
答案:对
答案:对
答案:错
答案:对
答案:错
答案:对
答案:差分替代微分的离散化###连续控制律的卷积离散化###塔斯汀双线性近似
答案:0.5
答案:代数和
温馨提示支付 ¥3.00 元后可查看付费内容,请先翻页预览!