长安大学
- 计算状态空间表达式的解,是从定量分析角度研究系统的运动规律。( )
- 凯莱-哈密顿定理法可以将状态转移矩阵
 的无穷级数定义式简化为有限项多项式计算。( )
的无穷级数定义式简化为有限项多项式计算。( ) - 从输出到
 的反馈不改变系统能观性,不能保证系统能恐性。( )
的反馈不改变系统能观性,不能保证系统能恐性。( ) - 内部稳定性是指系统状态运动的稳定性,反映的是系统内部状态受干扰的影响。( )
- 线性系统的状态观测器有两个输入,即原系统的输入u和系统的输出y。( )
- 李雅普诺夫稳定性是关于系统平衡状态的稳定性。( )
- 系统能观性和输入无关,故可令
 。( )
。( ) - 对于离散时间系统,迭代法可以应用于定常系统和时变系统的求解。( )
- 对于线性定常系统
 ,状态观测器存在的充要条件是不能观子系统渐进稳定。( )
,状态观测器存在的充要条件是不能观子系统渐进稳定。( ) - 内部稳定性实质上等同于李雅普诺夫意义下的渐近稳定。( )
- 对于离散时间系统,Z反变换法可以应用于定常系统和时变系统的求解。( )
- 当系统的传递函数不出现零、极点对消现象时,内部稳定性和外部稳定性等价。( )
- 设计带状态观测器的状态反馈系统时,必须先设计状态观测器,再设计状态反馈控制器。( )
- 状态转移矩阵包含了对应自治系统的全部信息。( )
- 一个系统的平衡状态可能有多个,因此系统的李亚普诺夫稳定性与系统受干扰前所处的平衡位置无关。( )
- 线性定常系统,约旦块对应的输入矩阵的第一行元素不全为零,则系统完全能控。( )
- 李雅普诺夫直接法的四个判定定理中所述的条件都是充分条件。( )
- 动态系统的输入输出关系是微分方程。( )
- 对偶系统的特征值相同,传递函数阵互为转置。( )
- 若一线性定常系统的平衡状态是渐近稳定的,则从系统的任意一个状态出发的状态轨迹随着时间的推移都将收敛到该平衡状态。( )
- 现代控制理论的研究范围及分支包含( )。
- 线性定常系统,引入反馈结构( )可以改变系统的特征值。
- 下面关于线性定常连续系统的状态转移矩阵表述正确的是( )。
- 若取初始时刻
 ,线性定常离散系统状态方程可以写为
,线性定常离散系统状态方程可以写为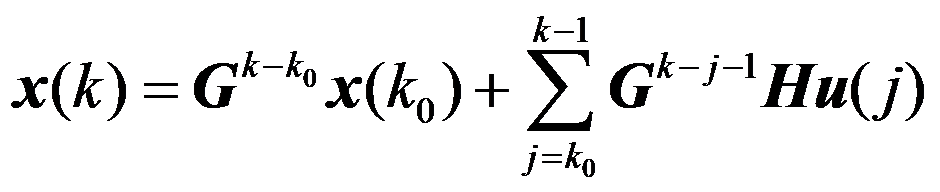 ,则下列描述正确的是( )。
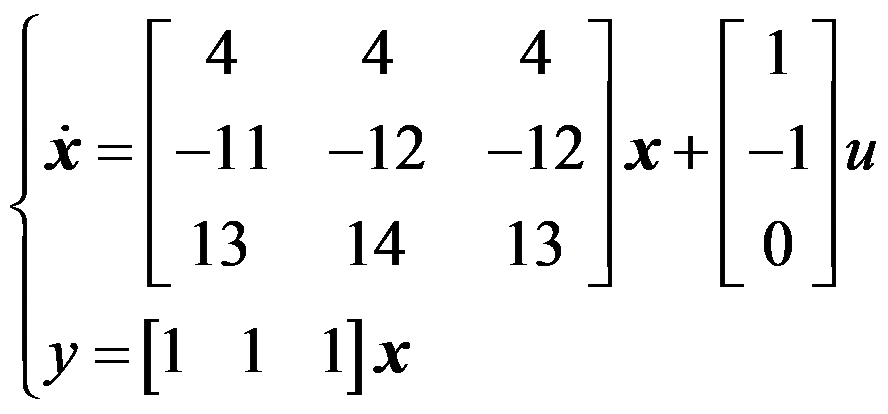
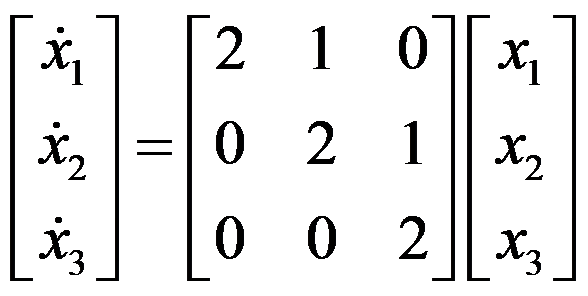
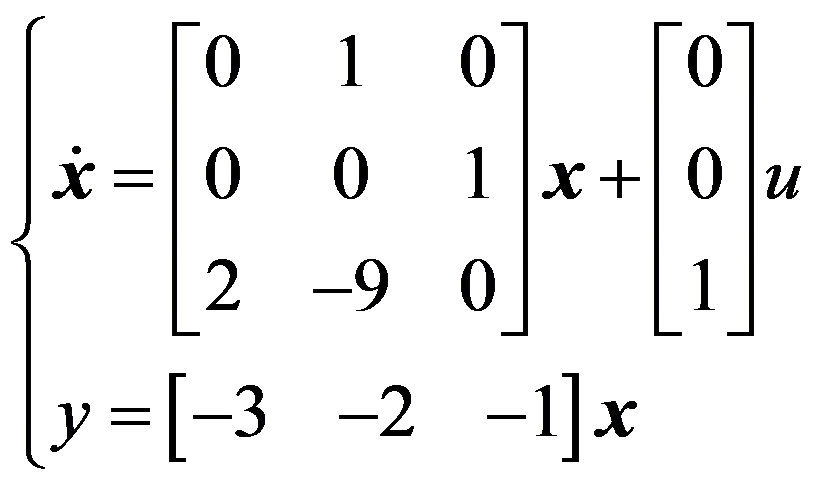
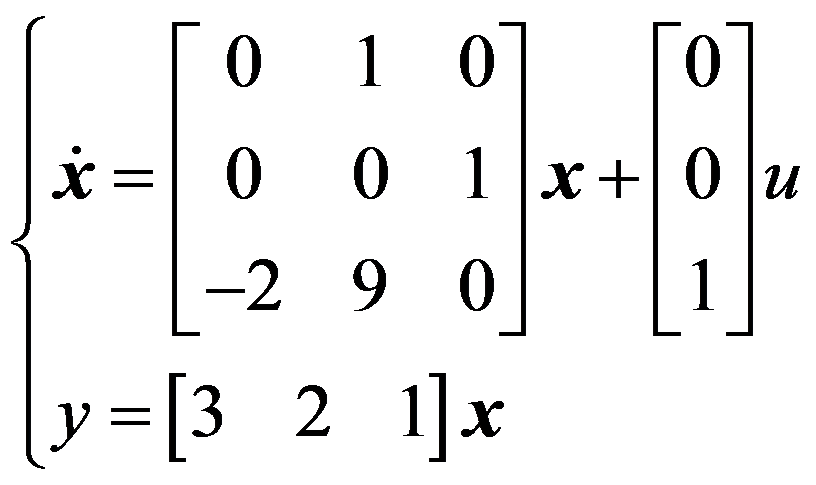
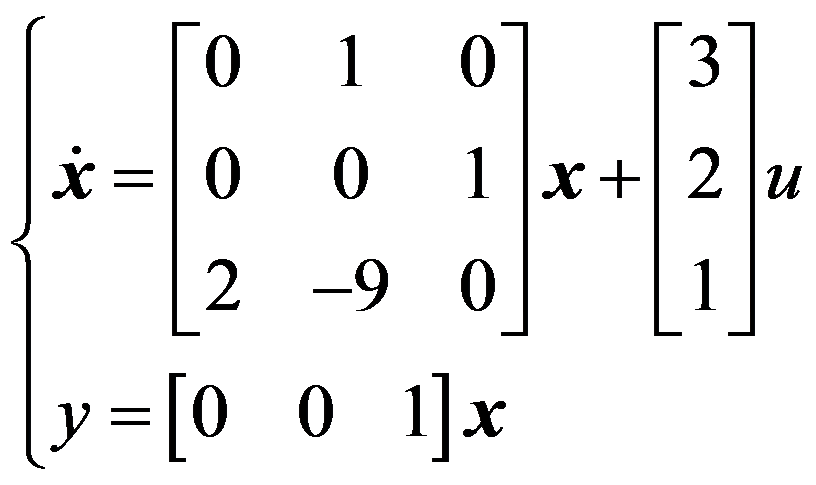
,则下列描述正确的是( )。 - 设系统的状态空间表达式为:
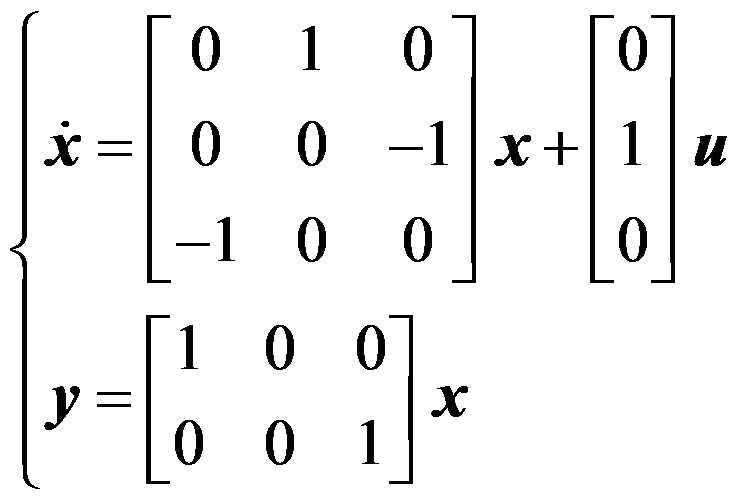
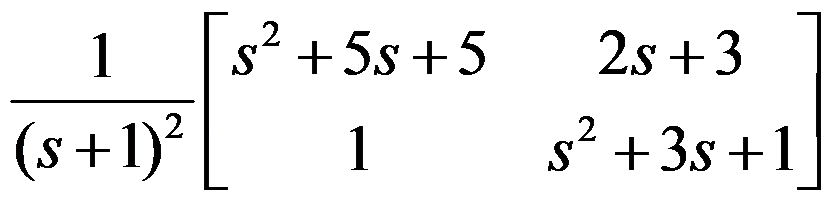
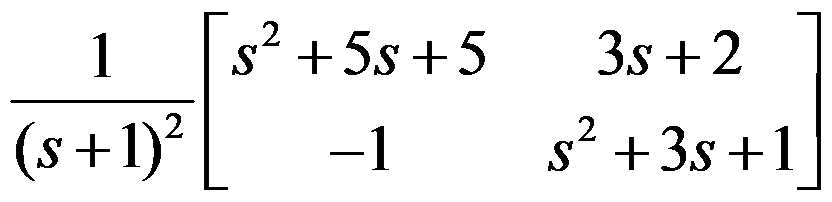
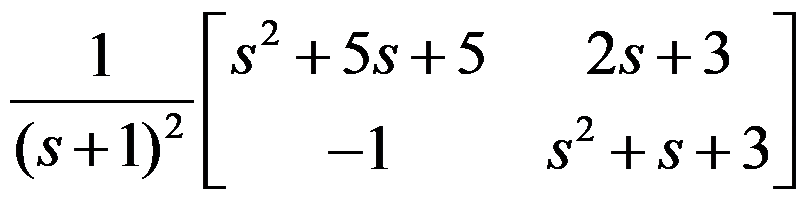
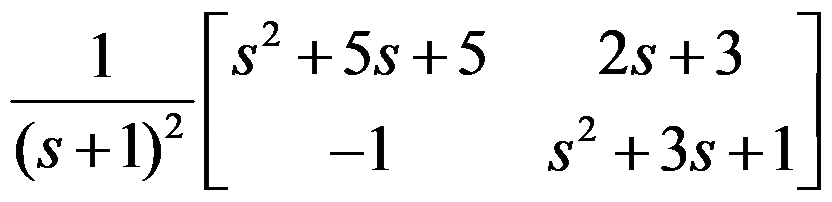
则该系统( )。 - 已知系统的状态空间表达式为:
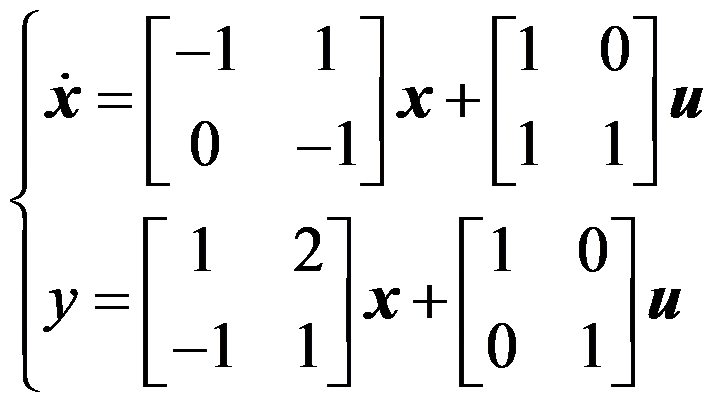
系统的传递函数矩阵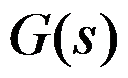 为( )。
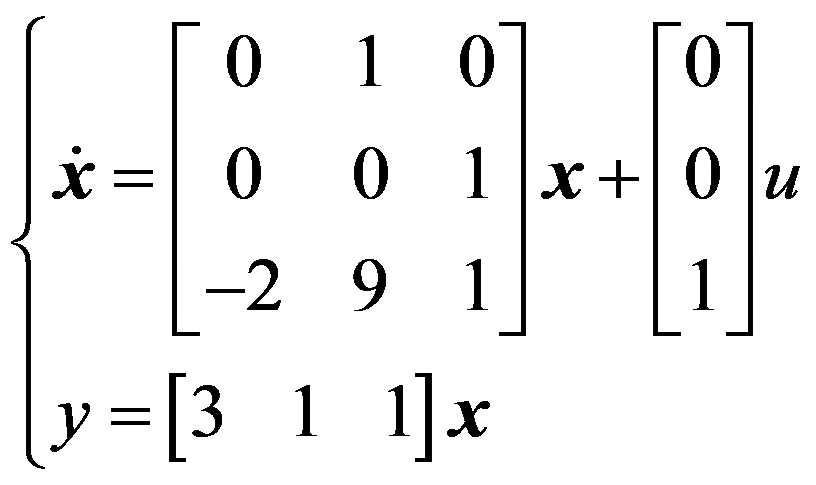
为( )。 - 线性系统的状态空间表达式为:
 ,
,
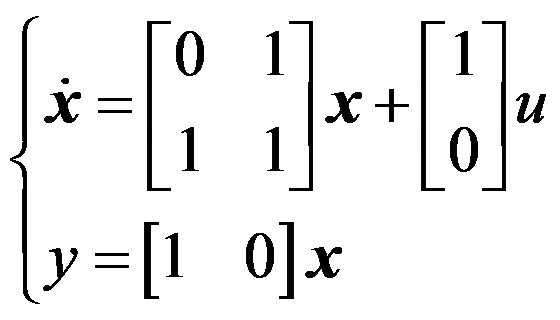
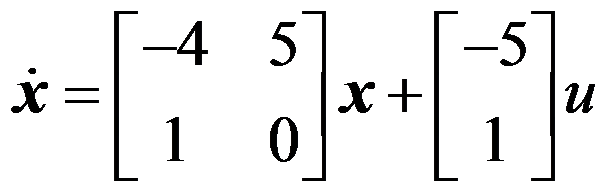
则系统的能控标准型为( )。 - 设被控系统的状态空间表达式为:
试选择反馈增益阵 ( ),将闭环极点配置为-5,-8。
( ),将闭环极点配置为-5,-8。 - 对于非线性系统
可以判断系统稳定性的李雅普诺夫函数为( )。 - 系统的状态空间表达式为:
通过状态反馈( )可把系统的闭环极点配置在-10和 处。
处。 - 当状态向量不便或不能直接测量时,可通过( )获取状态估值。
- 已知非线性系统的微分方程为:
利用近似线性化方法得到系统的局部线性化状态空间表达式是( )。 - 设计状态反馈阵第一步需要验证( )。
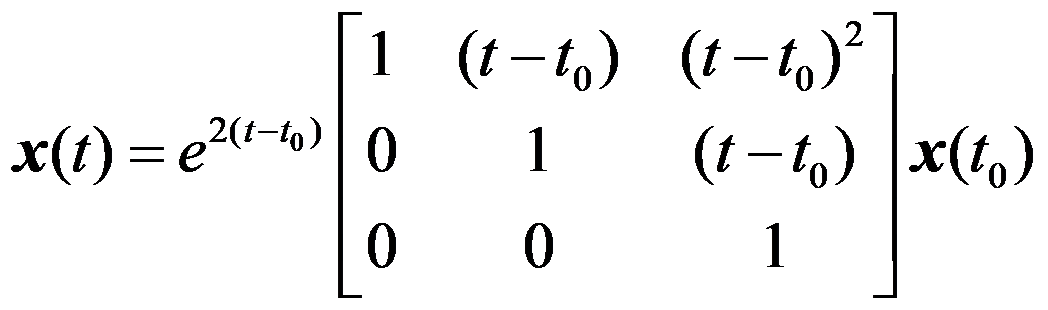
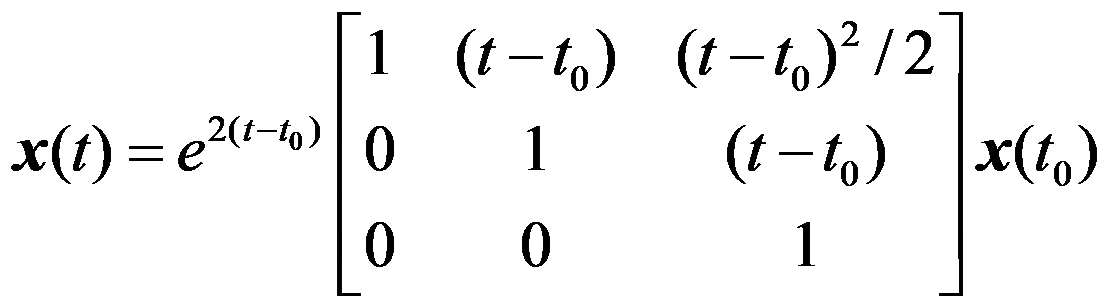
- 系统状态方程和初始条件分别为:
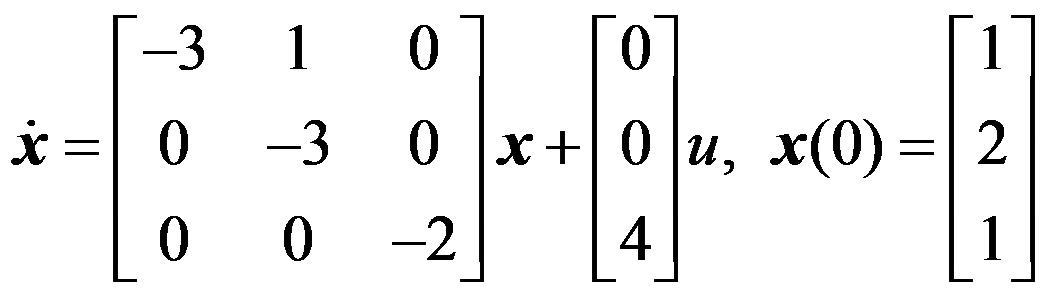
系统在单位阶跃输入作用下的响应为( )。 - 多输入-多输出线性时不变系统状态空间表达式的矢量矩阵形式为( )。
- 系统状态空间描述的系统矩阵
 为
为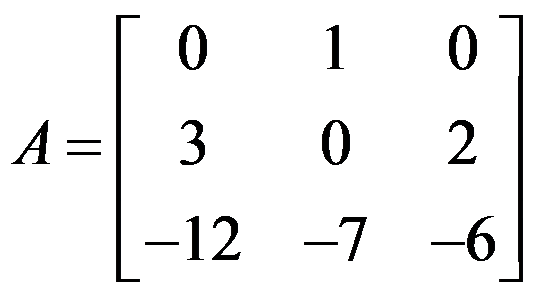
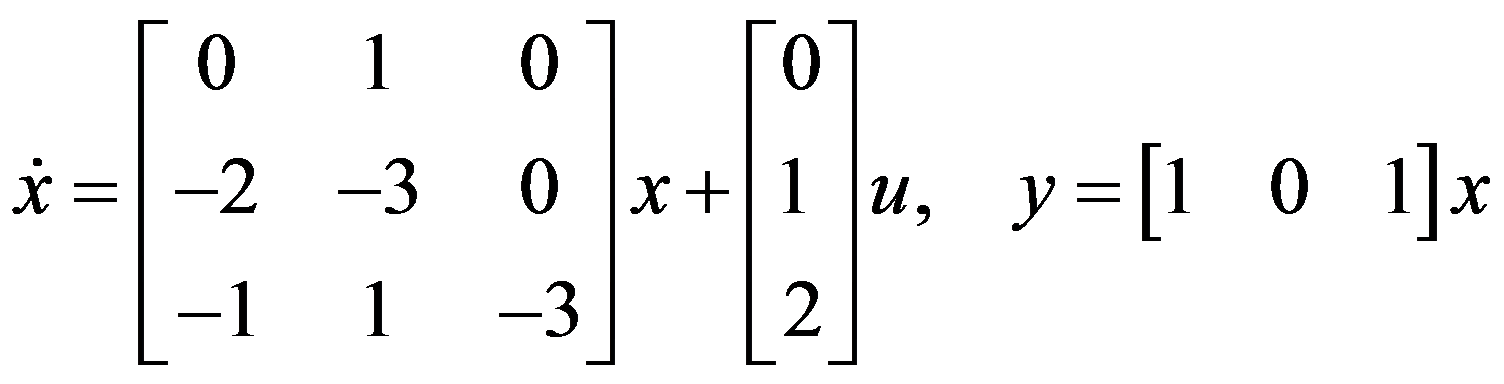
系统的特征值为( )。 - 设系统的状态空间为:
降维观测器( )可以使得它的极点位于-3、-4处。 - 系统
 的能观标准型实现为( )。
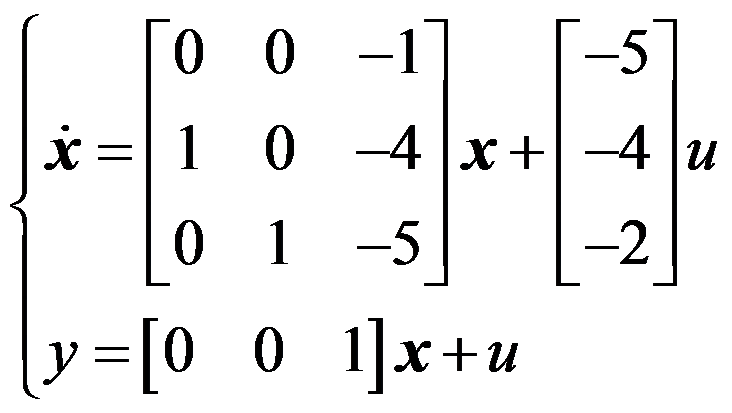
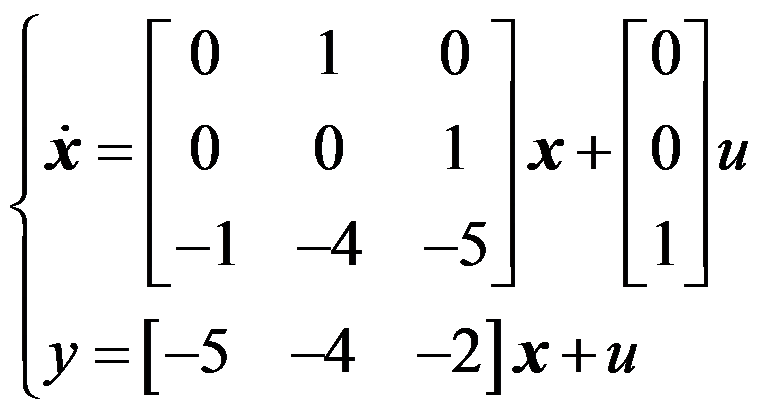
的能观标准型实现为( )。 - 已知单输入单输出系统的微分方程为

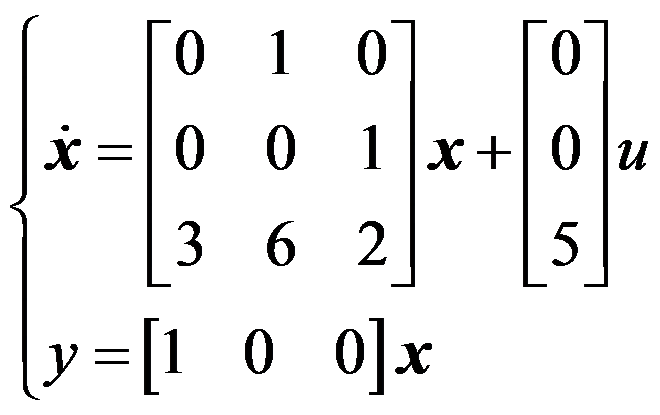
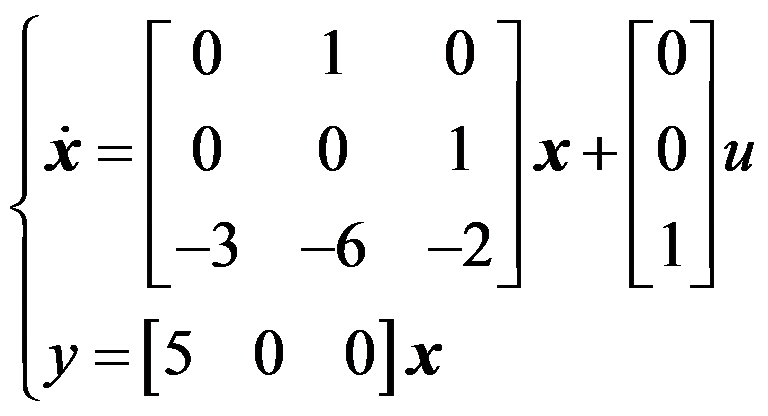
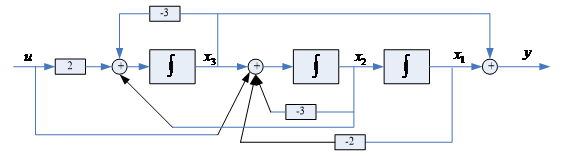
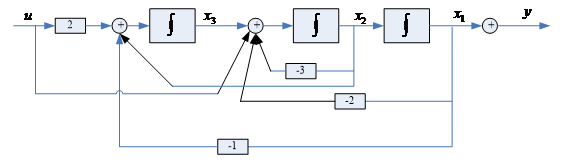
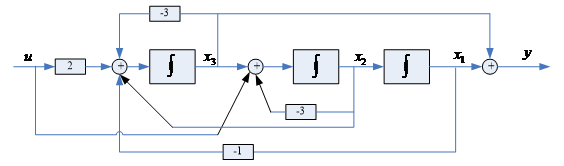
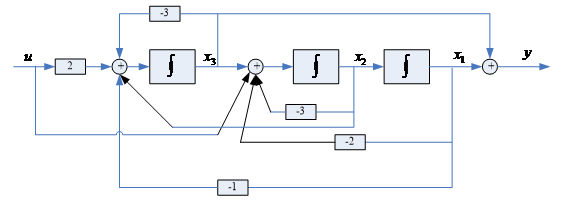
则系统状态空间模型为( )。 - 线性系统的状态空间表达式为:
则系统的模拟结构图为( )。 - 已知两个子系统反馈连接的结构图如下:
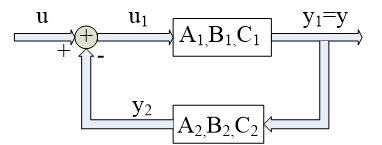
反馈连接后组合系统的传递函数阵为( )。 - 下面关于线性定常连续系统的Lyapunov方法说法错误的是( )。
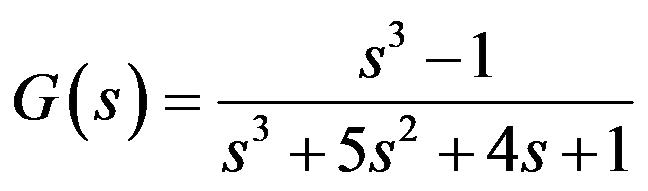
- 系统的传递函数为
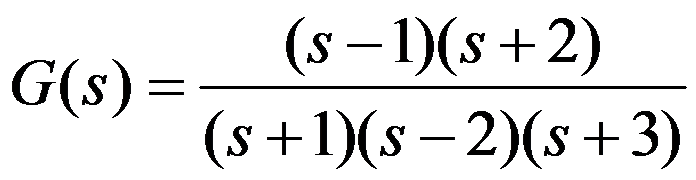 ,若利用状态反馈将其传递函数变成
,若利用状态反馈将其传递函数变成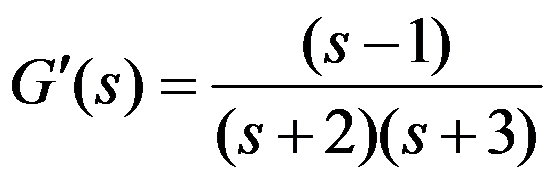 ,则需配置闭环期望极点为( )。
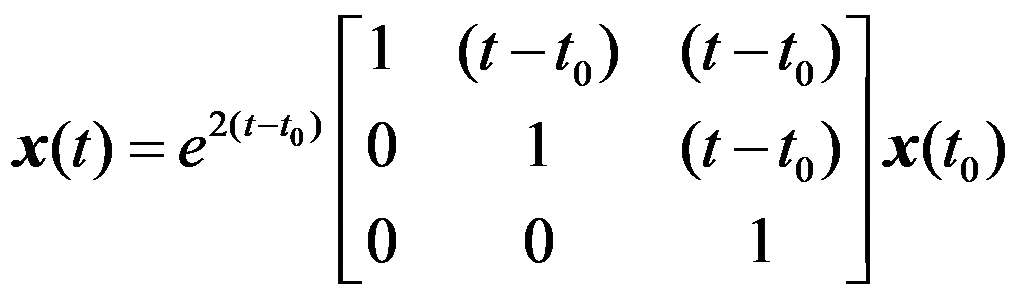
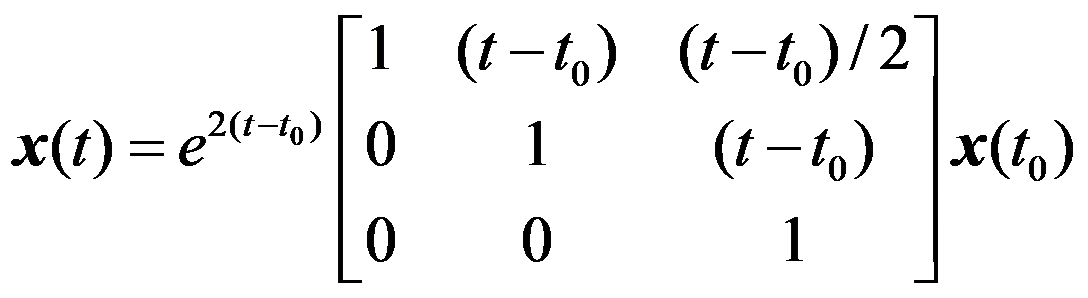
,则需配置闭环期望极点为( )。 - 齐次状态方程
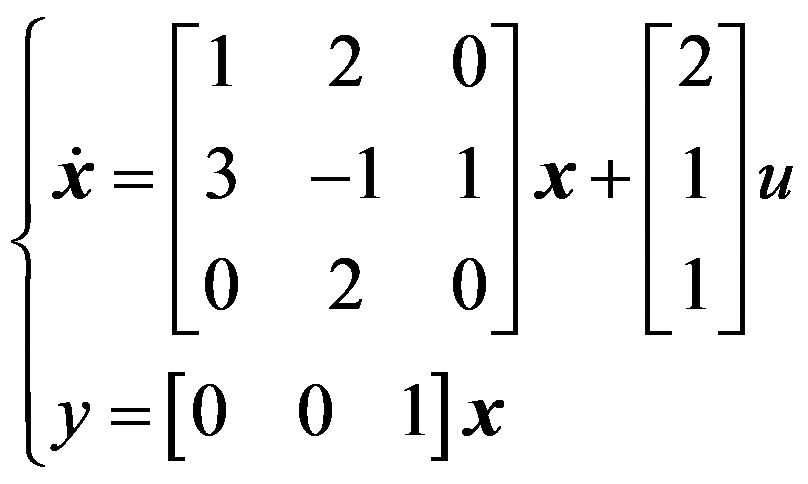
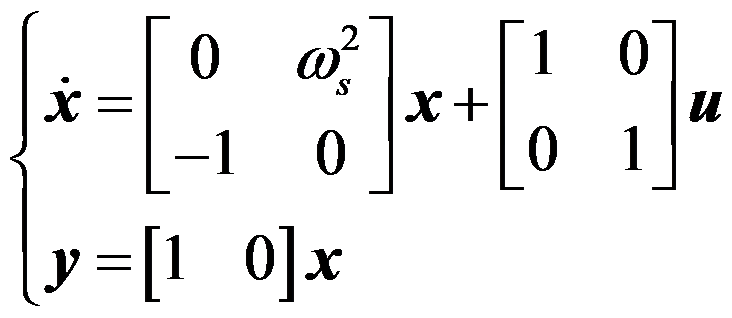
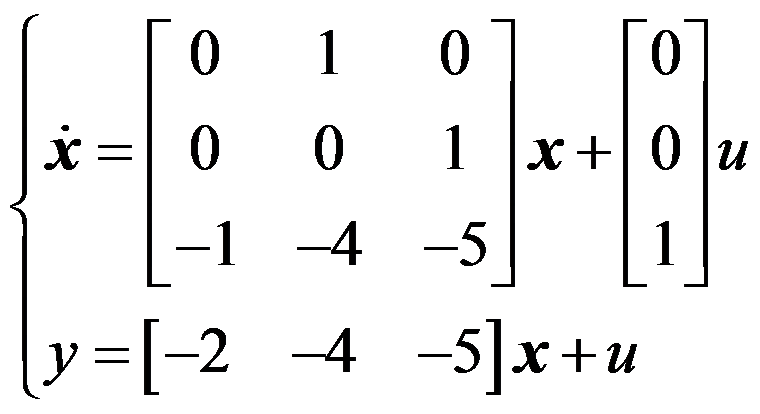
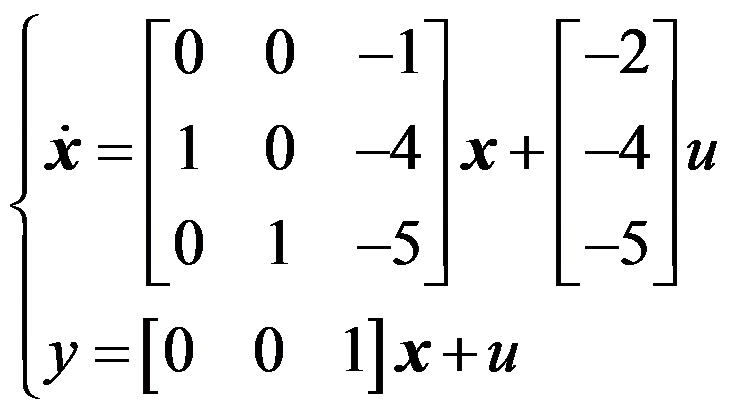
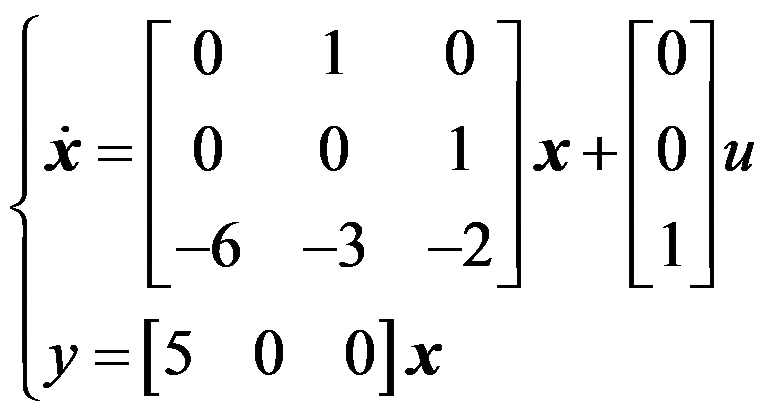
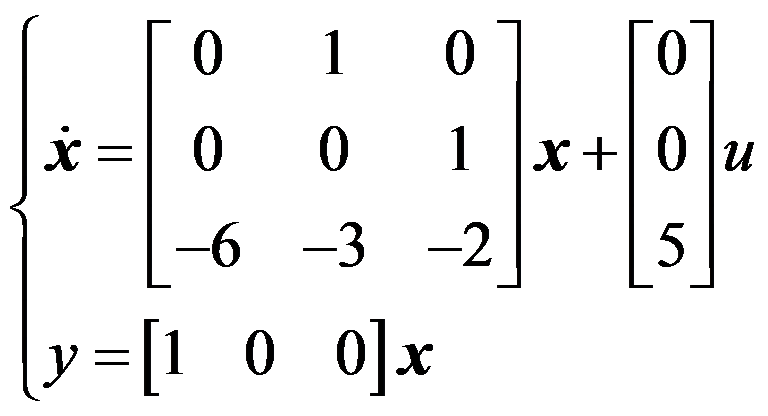
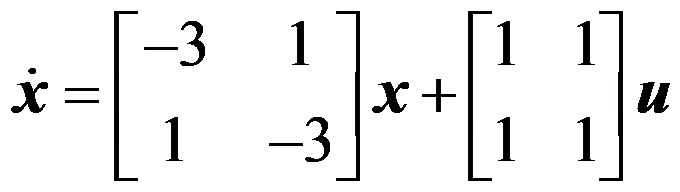
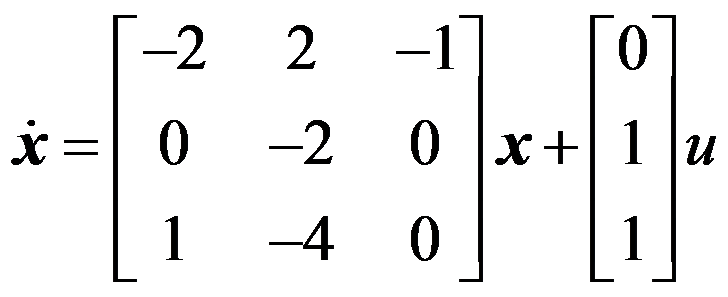
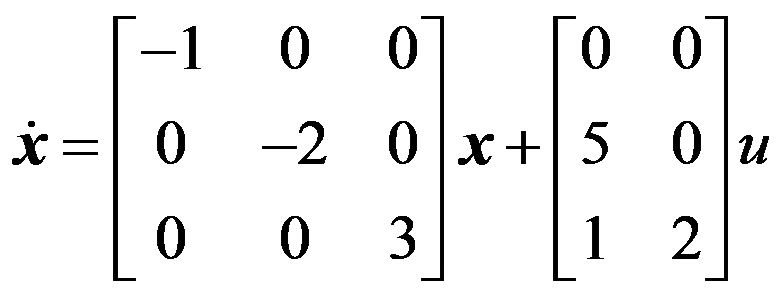
的解的是( ) - 下列系统具有能控性的有( )。
A:错 B:对
答案:对
A:对 B:错
答案:对
A:错 B:对
答案:错
A:错 B:对
答案:对
A:错 B:对
答案:对
A:错 B:对
答案:对
A:对 B:错
答案:对
A:对 B:错
答案:对
A:错 B:对
答案:对
A:对 B:错
A:错 B:对
A:错 B:对
A:错 B:对
A:对 B:错
A:错 B:对
A:错 B:对
A:错 B:对
A:对 B:错
A:对 B:错
A:错 B:对
A:自适应控制理论
B:线性系统理论
C:最优估计理论
D:最优控制理论
A:输出反馈
B:从输出到
的反馈C:状态反馈
D:从输出到
 的反馈
的反馈A:状态转移矩阵不唯一
B:
C:
D:

A:
 为受迫运动
为受迫运动B:
 为自由运动
为自由运动C:
 为受迫运动
为受迫运动D:
 为自由运动
为自由运动A:状态反馈不能镇定
B:输出反馈能镇定
C:输出反馈不能镇定
D:状态反馈能镇定
A:
B:
C:
D:
A:
B:
C:
D:
A:
B:
C:
D:
A:
B:
C:
D:
A:
B:
C:
D:
A:输出反馈
B:从输出到
的反馈C:状态反馈
D:状态观测器
A:
B:
C:
D:
A:系统能观性
B:不需要验证
C:系统能控性和能观性
D:系统能控性
A:
B:
C:
D:
A:
B:
C:
D:
A:

B:

C:

D:
 ;
; A:

B:
C:
D:
A:
B:
C:
D:
A:
B:
C:
D:
A:
B:
C:
D:
A:

B:

C:

D:

A:
 渐近稳定,
渐近稳定, 正定,
正定, 一定正定。
一定正定。B:
 渐近稳定,
渐近稳定, 半正定,
半正定, 一定正定。
一定正定。C:
 半正定,
半正定, 正定,不能保证
正定,不能保证 渐近稳定。
渐近稳定。D:
 渐近稳定,
渐近稳定, 半正定,且沿状态轨迹方向的非零解不恒为0,
半正定,且沿状态轨迹方向的非零解不恒为0, 一定正定。
一定正定。A:

B:

C:

D:

A:
B:
C:
D:
A:
B:
C:
D:
温馨提示支付 ¥5.00 元后可查看付费内容,请先翻页预览!