第五章测试1.在INS/GPS间接法位置松组合导航系统中量测量选取为( )
A:GPS系统测量的位置 B:INS系统和GPS系统测量的位置之差 C:INS系统测量的位置 D:GPS系统测量的伪距
答案:B
2. INS/GPS( )模式将GPS测得伪距和由惯性导航系统解算得到的伪距之差作为卡尔曼滤波的观测量。
A:紧组合 B:开环法 C:松组合 D:闭环法 3.下图展示的是( )校正法。
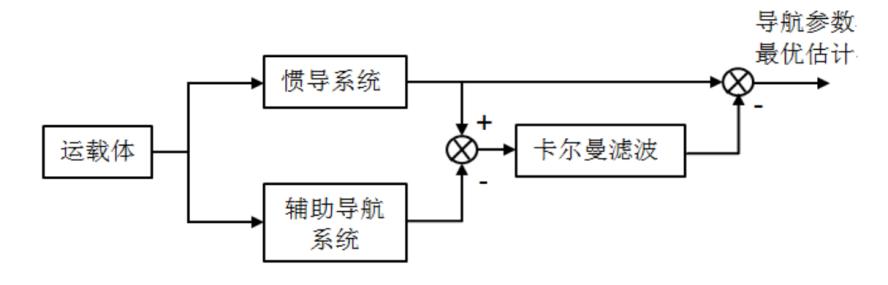
A:输出校正法 B:反馈校正法 C:输入校正法 D:闭环法 4.松组合是指各传感器之间并不相互修正与辅助,只是利用各传感器的观测信息,通过状态估计,得到关于导航参数的最优或次最优估计。( )
A:错 B:对 5.组合导航选取状态量的方式可以分为直接法和间接法,其中直接法是以各子系统的误差量作为状态。( )
A:错 B:对 6.反馈校正法是将估计反馈到惯性导航系统和辅助导航系统中,估计出的导航参数就作为惯性导航力学编排中的相应参数,估计出的误差作为校正量,将惯性导航系统或其它导航设备中的相应误差量校正掉。( )
A:错 B:对 7.利用卡尔曼滤波解决组合导航问题时只能用反馈校正。( )
A:对 B:错 8.在间接法中量测量选取为两个导航系统关于统一导航参数的差值。( )
A:对 B:错 9.下列关于INS/GPS松组合模式说法错误的有( )
A:松组合是一种相对容易实现的组合,其主要特点是GPS接收机和惯性导航系统仍独立工作 B:将GPS测得伪距和由惯性导航系统解算得到的伪距之差作为卡尔曼滤波的观测量。 C:各传感器之间并不相互修正与辅助 D:工作模式是组合程度较深的组合方式,其主要特点是GPS接收机和惯性导航系统相互辅助。 10.下列关于INS/GPS紧组合模式说法正确的有( )
A:各传感器之间并不相互修正与辅助 B:紧组合工作模式是组合程度较深的组合方式,其主要特点是GPS接收机和惯性导航系统相互辅助。 C:紧组合将GPS测得伪距和由惯性导航系统解算得到的伪距之差作为卡尔曼滤波的观测量 D:紧组合的基本方式是伪距、伪距率组合。
温馨提示支付 ¥3.00 元后可查看付费内容,请先翻页预览!
