- 在实际控制器的设计中,我们常常利用微分环节改善系统的稳态性能。 ( )
- 控制系统设计的步骤为系统建模、系统设计、系统分析。 ( )

- 开环频率特性的低频段表征了闭环系统的动态性能。( )
- 既有前向通路又有反馈通路的控制方式称为串联控制。 ( )
- 超前校正是由于正相移的作用,使截止频率附近的相位明显上升,从而具有较大的稳定裕度。 ( )
- 闭环极点与负实轴的夹角反映了系统的超调量。 ( )
- 两个传递函数分别为G1(s)与G2(s)的环节,以并联方式连接,其等效传递函数为G(s),则G(s)为G1(s)*G2(s)。 ( )
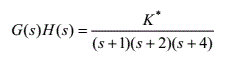
- 根轨迹是闭环系统某一参数从零变到无穷时,闭环系统特征方程式的根在s平面上变化的轨迹。 ( )
- 当比例微分环节的输出量为变量时,输出量中仅仅包含于输入量成正比的量。 ( )
- 当满足n-m≥2时,开环极点之和等于闭环极点之和。 ( )
- 振荡环节的特地是若输入为一阶信号,则其动态响应具有振荡的形式。 ( )
- 当比例微分环节 的输入量为恒值的时候,其输出量与输入量成正比。 ( )
- 单位反馈系统的稳态误差和稳态偏差相同。 ( )
- 一般讲系统的位置误差指输入是斜坡信号所引起的位置上的误差。 ( )
- 最小相位系统是指S右半平面不存在系统的开环极点及开环零点。 ( )
- 时滞环节的存在对系统的稳定性是没有影响的。 ( )
- 传递函数表示了系统的固有特性,是一种用象函数描述系统的数学模型。 ( )
- 控制系统的动态结构图,又称为方框图,其中信号线上的箭头表示信号传递的方向。 ( )
- 当系统的相角裕度大于零,幅值裕度大于1时,系统不稳定。 ( )
- 前馈校正又称顺馈校正。 ( )
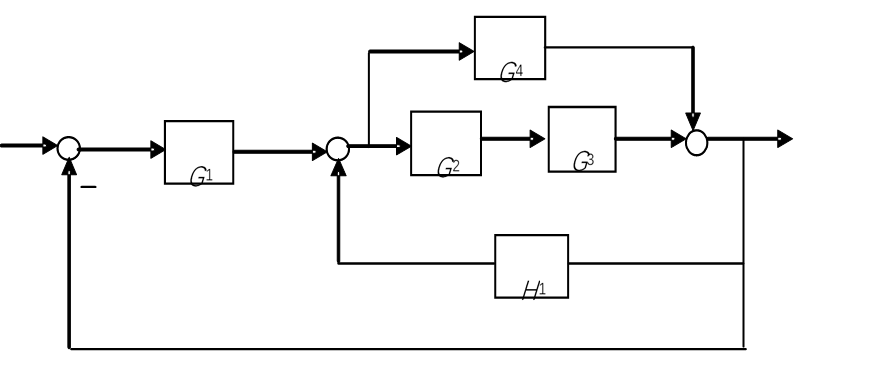
- 绘制动态结构图的一般步骤为( )。
- 根轨迹分析法适用于( )。
- 以下校正方法中,哪种是控制系统工程中最常用的( )。
- 以下哪些为现代控制理论的特征( )。
- 下面那些角是关于实轴对称的( )。
- 增加合适的开环极点( )。
- 以下哪些为典型输入信号( )。
- 关于PI控制器作用,下列观点正确的有( )。
- 微分环节的特点( )。
- 开环频率特性的高频段表征了闭环系统的哪些性能( )。
- 下列哪些属于典型输入信号( )。
- 在系统对输入信号的时域响应中,与其调整时间长短无关的是( )。
- 建立系统数学模型的方法( )。
- 关于奈氏判据及其辅助函数 F(s)= 1 + G(s)H(s),正确的说法是( )。
- 下列系统中属于稳定的系统是( )。
- 在PID控制规律表达式 中,关于比例、积分、微分控制的作用及各个系数大小的影响,以下描述完全正确的是( )。


- 若某系统的根轨迹有两个起点位于原点,则说明该系统( )。

- 若二个系统的根轨迹相同,则二个系统有相同的( )。

- 相位超前校正装置的奈氏曲线为( )。

- 一阶系统的阶跃响应( )。
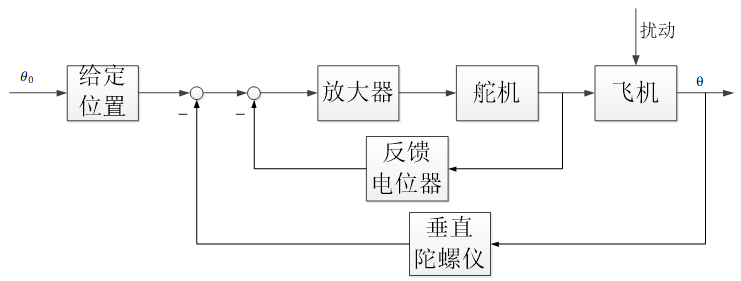
- 位置闭环控制系统的反馈环节通常是( )。
- 函数f(t)=sin4t+cos4t拉氏变换后为( )。
- 经典控制理论是以( )为基础,主要研究单输入单输出、线性定长系统的分析和设计问题。
- 最小相位系统的开环增益越大,其( )。


- 已知二阶系统单位阶跃响应曲线呈现等幅震荡,则其阻尼比可能为( )。
- 下列哪种措施对提高系统的稳定性没有效果 ( )

- 超前校正是利用超前网络的( )
- PI控制为以下哪种控制方式( )
- 串联校正方法包括串联超前校正、串联滞后校正、串联滞后-超前校正。
- PID控制器包含一个比例环节、一个积分和一个微分环节。
- 控制系统校正的方法有( )
- 以下哪种属于前馈校正( )
- 滞后校正是利用滞后网络的( )
- 无源校正网络的方式有哪些( )



- 伯德图由对数幅频曲线和对数幅相曲线两部分组成。

- 已知某些系统的开环传递函数如下,属于最小相位系统的是( )
- 正穿越是相角增加的穿越,负穿越是相角减小的穿越。

- 关于最小相位系统描述正确的是( )


- 输出信号与输入信号的相位差随频率变化的关系是( )

- 分离点的位置可由什么方法确定( )

- 根轨迹与虚轴交点处满足( )
- 开环传递函数为G(s)H(s)=K/s³(s+3),则实轴上的根轨迹为( )
- 如果根轨迹在虚轴上,表示临界稳定,也就是不断振荡。
- 当系统开环传递函数G(s)H(s)的分母多项式的阶次n大于分子多项式的阶次m时,趋向s平面的无穷远处的根轨迹有( )
- 若要求系统的快速性好,则闭环极点应距虚轴越近越好

- 对于以下情况应绘制0°根轨迹的是( )
- 根轨迹的分支数与开环有限零点数m和有限极点数n中的大者相等,它们是连续的并且对称于实轴。
- 计算根轨迹渐近线的倾角的公式为( )
- 高阶系统的主导闭环极点越靠近虚轴,则系统的 ( )
- 若开环传递函数G(s)H(s)不存在复数极点和零点,则( )
- 如果系统闭环系统特征方程某项系数为负数,系统不稳定。
- 关于线性系统稳定性的判定,下列观点错误的是 ( )

- 判断一个闭环线性控制系统是否稳定,可采用( )


- 采用负反馈形式连接后,则 ( )
- 下列哪种措施对提高系统的稳定性有效果 ( )

- 关于线性系统稳态误差,正确的说法是( )
- 奈奎斯特稳定判据中,Z = P - R ,其中P是指( )


- 系统反馈量与误差信号的比值,称为闭环传递函数的开环传递函数。
- 传递函数能反应非零初始条件下系统的运动过程。
- 描述系统动态特性的数学表达式称为( )
- ( )反应了系统的输入,输出以及其他变量之间的数学关系。
- 利用梅森公式不需要求出动态结构图的等效变换,便可求出系统的传递函数。
- 传递函数只适用于线性系统。
- 系统的动态结构图一般有哪些基本符号组成。( )
- 当反馈环节H(s)为( )时,称为单位反馈。
- 开环传递函数是( )的比值。
- 与非线性系统相比较,线性系统具有( )
- RC电路的数学模型是一个( )常系数线性微分方程。
- 若线性系统的系数为常数该系统为( )
- 自控系统的分类正确的是( )
- 对于自动控制系统的性能最基本的要求是( )
- 控制系统的性能指标有( )
- 自动控制系统的基本控制方式有 开环控制、闭环控制、反馈控制三种。
- 复合控制有两种基本形式:即按( )的前馈复合控制和按( )的前馈复合控制。
- 根据系统方程系数是否为常数分类,可分为( )系统。
- 前馈补偿控制属于基本控制方式中的哪种( )
- 自动控制系统中应用最多的控制方式是( )
- 自动控制系统包括 控制器、受控对象、检测元件三部分。
答案:错
答案:错
答案:错
答案:错
答案:错
答案:对
答案:对
答案:错
答案:错
答案:错
答案:对
温馨提示支付 ¥5.00 元后可查看付费内容,请先翻页预览!