1.拉格朗日函数L等于( )。
A:整个系统的动能和势能之差
B:某个杆件的动能和势能之和
C:整个系统的动能和势能之和
D:某个杆件的动能和势能之差
答案:整个系统的动能和势能之差
2.某关节为移动关节,则D-H模型中哪个量为变量( )。
A:关节平移量
B:关节回转量
C:杆件长度
D:杆件扭角
答案:关节回转量
3.机器人机构单元是由关节连在一起的许多刚柔连杆形成开环运动学链系的集合体。( )
A:错
B:对
答案:对
4.工业机器人的负载能力是指机器人最大臂长静态时的提升负荷。( )
A:错
B:对
答案:错
5.在运动学研究中,首先是要确定坐标系。( )
A:错
B:对
答案:对
6.雅克比矩阵的元素值是固定不变的。( )
A:对
B:错
答案:对
7.目前机器人发展已经完成了第四代机器人历程。( )
A:对
B:错
答案:错
8.工业机器人智能化的重要途径是增加视觉感知和力触感知,基于两种感知进行智能控制。( )
A:正确
B:错误
答案:正确
9.人工智能就是智能机器人。( )
A:错误
B:正确
答案:错误
10.传统工业机器人无法直接应用在非结构场景的原因在于智能感知能力极其有限。( )
A:对
B:错
答案:对
11.工业机器人虚拟训练是一种不切实际的模拟,得不到有价值的应用模型。( )
A:对
B:错
A:对 B:错 13.谐波减速器特点哪个是不对的( )。
A:零件少、重量轻 B:存在柔性部件 C:传动比可为1:1 D:单级传动比可在30-300 14.力位混合控制中,哪个是正确的( )。
A:通过协调力和位置实现柔顺控制的方式 B:力控和位置控制分时起作用 C:是一种把力反馈信息融入位置反馈环节中的力控方式 D:力控和位置控制同时起作用 15.3X3的姿态矩阵的行元素的物理意义( )。
A:参考坐标系某个单位轴在目标坐标系三个轴上的投影 B:参考坐标系三个单位轴在目标坐标系某一轴上的投影 C:目标坐标系某个单位轴在参考坐标系三个轴上的投影 D:目标坐标系三个单位轴在参考坐标系某一轴上的投影 16.牛顿欧拉法建立动力学方程时,运动特性的递推从哪里开始( )。
A:末端 B:某个杆件的关节 C:基座 D:大地坐标系 17.多项式函数插值中,哪个说法是错误的( )。
A:三次多项式函数插值的速度为抛物线。 B:五次多项式函数插值需要4个约束条件。 C:三次多项式函数插值存在惯性力冲击。 D:五次多项式函数插值运动过渡平稳。 18.工业机械手的手眼标定过程,哪些程序不需要( )。
A:基于相机内外参数确定物体到相机坐标系的换算关系 B:调整机械手,获得两个不同的位姿 C:移动相机到两个不同的位置 D:机械手末端固定标定物 19.下图描述的是属于哪一种目标状态估计的数据融合结构?
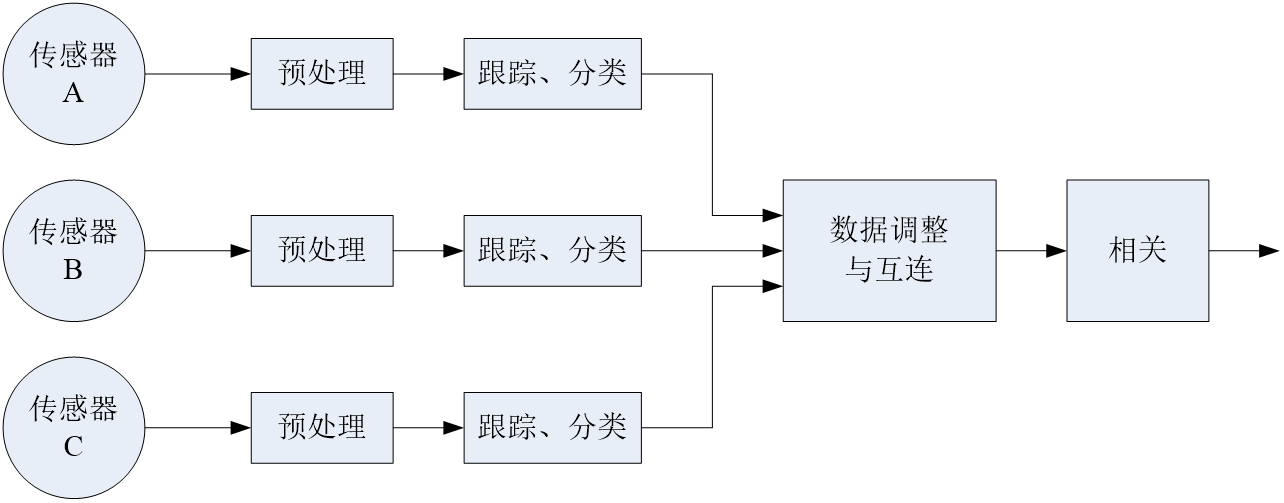 ( )
( ) A:分布式 B:没有正确选项 C:集中式 D:综合式 20.弧焊机器人如何自主循迹( )。
A:通过激光定位导引 B:通过轨迹示教 C:通过编程规划路径 D:通过触觉感知控制 21.
 该图中,坐标系3-4的变换中,关节平移量为多少( )。
该图中,坐标系3-4的变换中,关节平移量为多少( )。 A:200 B:300 C:0 D:-200 22.关于双机器人协同焊接,以下哪些有误( )。
A:系统建设成本低廉 B:可以进行复杂形状焊接 C:焊接过程可以实现无人化 D:可用于不同的零件焊接,适应面广 23.在擦玻璃场合,拟选用哪种智能控制策略( )。
A:力位混合控制 B:位置伺服控制 C:位置型阻抗控制 D:柔顺型阻抗控制 24.力反馈型的阻抗控制系统中,力位反馈系数Kfp越大,则柔顺性( )。
A:越小 B:没有相关 C:不变 D:越大 25.浮动去毛刺工具( )。
A:是一种刚性刀具 B:是一种主动柔顺刀具 C:是一种被动柔顺刀具 D:可用常规加工工具替代 26.力反馈型阻抗控制( )。
A:是一种直接力控制系统。 B:是用末端力传感器测量到的力信号引入位置控制系统,构成力反馈型阻抗控制。 C:本质上是位置控制,是把力信息反映到位置控制当中。 D:包含位置控制环和速度控制环。 27.柔顺型的阻抗控制( )。
A:是通过位置与外力的协调而产生柔顺性的控制方法 B:是位置型阻抗控制增加了力反馈环路 C:可通过调节相应环路的系数矩阵实现刚度、阻尼控制和力控制 D:是一种直接力控制 28.步进电机的特点( )。
A:步距角有误差但不累积 B:不易受到干扰 C:高转速时具有最大转矩 D:开环控制结构 29.工业机器人的力感知方式有哪些( )。
A:在末端增加力传感器 B:在关节驱动器上测量电流间接测力 C:在关节集成力矩传感器 D:在末端增加视觉传感器 30.机器人力觉传感器按照安装位置不同可以分为哪几类?( )。
A:指尖(或末端)力传感器 B:关节力传感器 C:腕部力传感器 D:基座力传感器 31.机器人控制系统主要包含( )。
A:操作面板 B:接口单元 C:计算机单元 D:轴控制单元 32.信息融合处理的一般过程包括( )。
A:参数估计 B:数据校准 C:目标识别 D:数据相关 33.用工业机器人进行机加工有什么特点( )。
A:能应对各种零件和工具 B:很难实现高精度的机械加工 C:可实现灵活的加工 D:能实现智能加工 34.关于视觉伺服( )。
A:利用拍摄图像与目标图像进行对比再进行运动控制,实现视觉伺服 B:区别于机器人配机器视觉的控制在于视觉是伺服控制的其中一环节 C:利用图像提取目标位姿信息与期望位姿信息对比再进行运动控制,实现视觉伺服 D:机械手通过相机拍摄目标,利用图像或图像信息作为伺服控制反馈量 35.机器人触觉包含哪几种类型?( )。
A:压觉 B:力觉 C:滑觉 D:接触觉 36.动力学方程的一般形式包含哪些项( )。
A:惯性力项 B:离心力项 C:科氏力项 D:重力项 37.运动学方程主要解决哪些问题( )。
A:求速度问题 B:逆解问题 C:正解问题 D:求力问题 38.工业机器人的拖动示教实现方案主要有( )。
A:基于位置伺服实现位置示教 B:机械臂工作在力矩模式,用电流将重力和摩擦力补偿掉 C:基于力矩传感器实现关节的柔顺力控 D:基于末端六维力传感器实现末端的柔顺控制 39.运动学方程列写过程包含哪些步骤( )。
A:末端坐标系到基坐标系的级联换算 B:列写相邻坐标系的换算矩阵 C:列写DH模型参数 D:坐标系定义 40.ISO定义的机器人的特征有( )。
A:具有独立性 B:类人、类生物 C:具有智能性 D:具有通用性
温馨提示支付 ¥3.00 元后可查看付费内容,请先翻页预览!