浙江大学
- 采用不同的坐标系建立法则时,获得的运动学方程结果会不一样。( )
- 工业机器人智能化的重要途径是增加视觉感知和力触感知,基于两种感知进行智能控制。( )
- 时栅位移传感器的基本原理是在相互匀速运动的两个坐标系之间互相观测对方,一个坐标系上的位置之差表现为另一个坐标系上观测到的时间之差。( )
- 目前机器人发展已经完成了第四代机器人历程。( )
- 工业机器人的负载能力是指机器人最大臂长静态时的提升负荷。( )
- 工业机器人的自由度计算不包含工具的自由度。( )
- RV减速器适用于使用在工业机器人的手腕关节上。( )
- 传统工业机器人无法直接应用在非结构场景的原因在于智能感知能力极其有限。( )
- 在运动学研究中,首先是要确定坐标系。( )
- 交流伺服电机可采用常规交流异步电机+伺服控制实现。( )
- 运动学方程列写过程包含哪些步骤( )。
- 直流伺服电机种类( )。
- 关于视觉伺服( )。
- 信息融合处理的一般过程包括( )。
- 常见的数据融合算法有哪几类?( )。
- 常用的操作空间轨迹插补有哪些( )。
- 关于轨迹插补,哪些说法正确( )。
- 机器视觉与机器人结合( )。
- 运动学方程主要解决哪些问题( )。
- 在工业机器人应用中,采用多传感器融合的原因( )。
- 用工业机器人进行柔性线缆装配有哪些难点( )。
- 主动阻抗控制包含哪些方法( )。
- 机器人控制系统主要包含( )。
- 工业机器人的主要参数有( )。
- 力反馈型阻抗控制( )。
- 位置型的阻抗控制系统中,下述说法不正确的是( )。
- 相机标定所涉及到的坐标系包括世界坐标系、图像物理坐标系、图像像素坐标系和( )
- 哪个方法不能用于动力学分析( )。
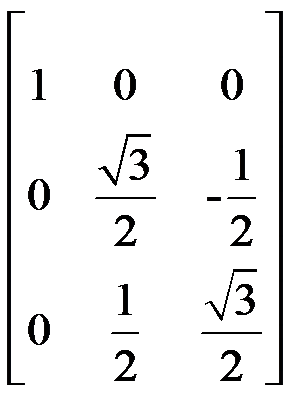
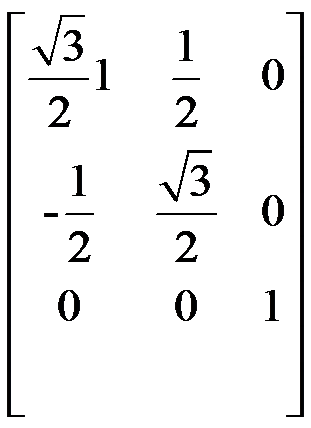
- 绕x轴旋转30°的旋转变换矩阵为( )。
- 关于柔顺控制的说法,那个说法不正确( )。
- 坐标系定义中,第二种坐标系方法的坐标原点定义在( )。
- 操作空间的微运动和关节空间的微运动的比值为( )。
- 哪些场景不需要进行力传感( )。
- 下图描述的是属于哪一种目标状态估计的数据融合结构?
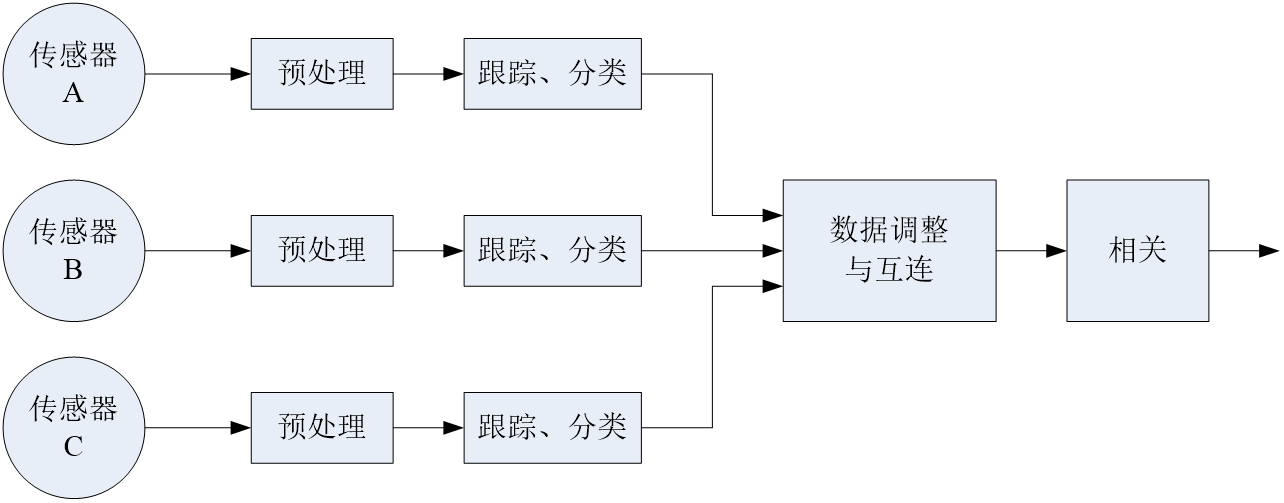 ( )
( ) - 步进电机怎么调速( )。
- 传感器按构成原理分类可为( )
- 直流伺服电机的机械特性( )。
- https://image.zhihuishu.com/zhs/doctrans/docx2html/202101/a7bd27f4a92145578b6e68e916bb25af.png
- 力反馈型的阻抗控制系统中,力位反馈系数Kfp越大,则柔顺性( )。
- 工业机械手的手眼标定过程,哪些程序不需要( )。
A:错 B:对
答案:B:对
A:对 B:错
答案:对
A:错 B:对
答案:对
A:对 B:错
答案:错
A:对 B:错
答案:错
A:错 B:对
答案:对
A:错 B:对
答案:错
A:对 B:错
答案:对
A:错 B:对
答案:对
A:错 B:对
A:列写相邻坐标系的换算矩阵
B:末端坐标系到基坐标系的级联换算
C:列写DH模型参数
D:坐标系定义
A:永磁同步
B:无刷直流
C:异步交流
D:有刷直流
A:机械手通过相机拍摄目标,利用图像或图像信息作为伺服控制反馈量
B:区别于机器人配机器视觉的控制在于视觉是伺服控制的其中一环节
C:利用拍摄图像与目标图像进行对比再进行运动控制,实现视觉伺服
D:利用图像提取目标位姿信息与期望位姿信息对比再进行运动控制,实现视觉伺服
A:数据校准
B:目标识别
C:数据相关
D:参数估计
A:估计方法
B:基于分类的方法
C:推理方法
D:基于认知模型的算法
A:圆弧插补法
B:定距插补法
C:定时插补法
D:直线插补法
A:机器人的连续路径控制一般采用操作空间插补法。
B:关节空间插补,关节运动量确定,但末端运动量不确定。
C:操作空间插补,末端运动量确定,但关节运动量不确定。
D:机器人的点位控制一般采用关节空间插补法。
A:难点在于视觉的识别与检测
B:可用于3D物体的智能识别与抓取分拣
C:可用于2D物体的智能识别与抓取分拣
D:使机器人具有了视觉感知能力
A:求力问题
B:逆解问题
C:正解问题
D:求速度问题
A:多传感器融合能提升综合性能。
B:是实现工业机器人智能化应用的前提。
C:提升工业机器人感知环境的能力。
D:单一传感器感知能力有限。
A:线缆抓取与运动规划
B:线缆的运动后形态预测
C:线缆的空间定位
D:线缆的状态感知
A:位置型
B:力反馈型
C:动态混合型
D:柔顺型
A:轴控制单元
B:接口单元
C:计算机单元
D:操作面板
A:分辨率和负载能力
B:自由度
C:定位精度和重复精度
D:工作空间和运行速度
A:是用末端力传感器测量到的力信号引入位置控制系统,构成力反馈型阻抗控制。
B:是一种直接力控制系统。
C:包含位置控制环和速度控制环。
D:本质上是位置控制,是把力信息反映到位置控制当中。
A:是通过位置与速度的协调而产生柔顺性
B:是一种直接力控制的方法
C:有力反馈的控制
D:可实现阻尼控制
A:相机坐标系
B:物体坐标系
C:基座坐标系
D:工具坐标系
A:拉普拉斯法
B:凯恩法
C:拉格朗日法
D:牛顿欧拉法
A:
B:
C:
D:

A:机器人能够对接触环境顺应的能力被称为柔顺性
B:力控可分为操作空间力控和关节空间力控
C:机器人利用力的反馈信息,采用一定的控制策略去主动控制柔顺特性,称为力控制
D:碰撞保护不属于力控
A:前关节处
B:杆件重心点
C:杆件的中间
D:后关节处
A:动力方程
B:运动方程
C:某一常数
D:雅克比矩阵
A:表面喷涂
B:轴孔装配
C:人机协作
D:表面打磨
A:集中式
B:分布式
C:综合式
D:没有正确选项
A:调节脉冲宽度
B:调节驱动电流
C:调节驱动电压
D:调节脉冲频率
A:结构型
B:动态型
C:结构型和物性型
D:力行为型
A:没有规律
B:负载和转速成正比
C:负载和转速成反比
D:非线性相关
A:
B:
C:
D:
A:不变
B:越大
C:没有相关
D:越小
A:机械手末端固定标定物
B:调整机械手,获得两个不同的位姿
C:基于相机内外参数确定物体到相机坐标系的换算关系
D:移动相机到两个不同的位置
温馨提示支付 ¥5.00 元后可查看付费内容,请先翻页预览!