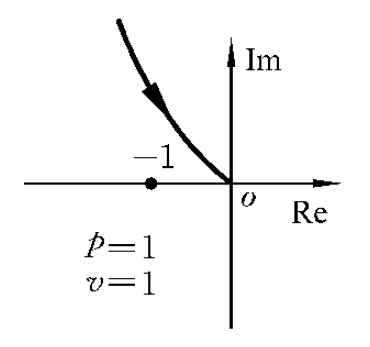
山东石油化工学院
- 同一个物理元件(物理环节或子系统)在不同系统中作用不同时,传递函数也可能不同。( )
- 响应的快速性指在系统稳定的前提下,当系统的输出量与给定的输入量之间产生偏差时,消除这种偏差的快速程度。( )
- 系统的输出不断直接或经过中间变换后全部或部分地返回到输入端,并与输入共同作用于系统的过程,称之为反馈。( )
- 响应的准确性指调整过程结束后,输出量与给定的输入量之间的偏差程度。( )
- 系统的频率特性和系统的传递函数无关。( )
- 对线性系统,若系数为常数则为线性定常系统。( )
- 超前校正需要一个附加的增益增量,以补偿超前校正的衰减。( )
- 机械工程控制论研究的任务是静力学问题。( )
- “经典控制理论”的内容是以传递函数为基础,主要研究单输入,单输出这类控制系统的分析和设计问题。( )
- 对数幅频特性横轴坐标采用对数分度。( )
- 比例积分控制器又称为 ( )。
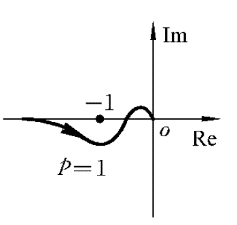
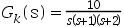
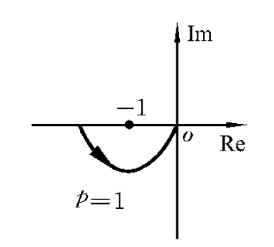
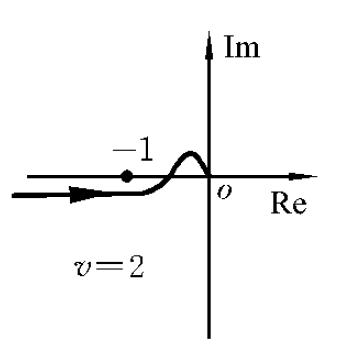
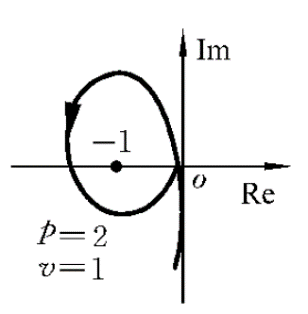
- 若系统开环频率特性如图所示,p为开环系统具有正实部特征根的数目,未标注时p=0,v为开环中积分环节的个数,则系统的稳定性( )。
- 某系统的开环Nyquist图,其开环传递函数
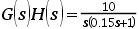 ,可以得出( )。
,可以得出( )。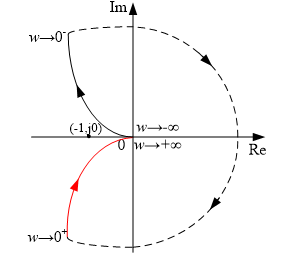
- 对数幅频特性低频段渐近线不为零分贝线的环节是( )。
- 由工程控制实践可知,为了使系统有较满意的稳定性储备,一般应使( )。
- 当系统若有特征根位于[s]平面的原点,位于[s]平面的左半平面,则系统( )。
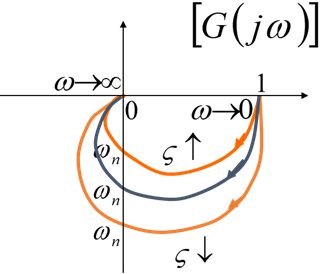
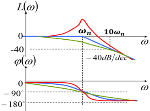
- 振荡环节
 的Nyquist图为( )。
的Nyquist图为( )。 - II型系统开环对数幅频渐特性的低频段斜率为( )。
- 若系统开环频率特性如图所示,p为开环系统具有正实部特征根的数目,未标注时p=0,v为开环中积分环节的个数,则系统的稳定性( )。
- 如下连续系统微分方程中是线性定常系统的为( )。
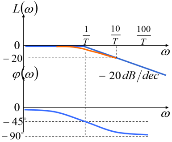
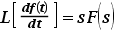
- 惯性环节
 的Bode图为( )。
的Bode图为( )。 - 系统的传递函数是在零初始条件下,其( )的Laplace变换之比。
- 控制系统的开环传递函数
 ,该系统为( )。
,该系统为( )。 - 某系统的开环Nyquist图,其开环传递函数
 ,可以得出( )。
,可以得出( )。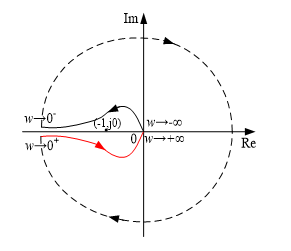
- 当系统若有特征根位于[s]平面的虚轴上,其余极点位于[s]平面的左半平面,则系统( )。
- 控制系统的开环传递函数
 ,该系统开环增益为( )。
,该系统开环增益为( )。 - 已知一单位反馈系统开环Bode图,其幅频特性在低频段是一条斜率为-20dB/dec的渐近直线,且延长线与0dB线的交点频率为
 ,则当输入为
,则当输入为 时,其稳态误差为( )。
时,其稳态误差为( )。 - 积分环节
 的Bode图为( )。
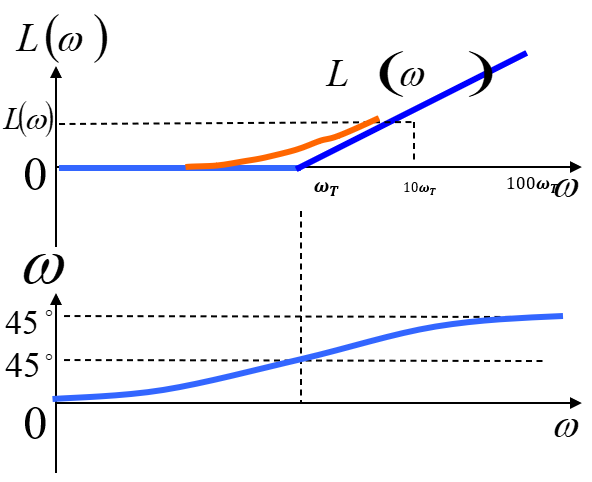
的Bode图为( )。 - 一阶微分环节
 的Bode图为( )。
的Bode图为( )。 - 对数幅频图上,
 ,即说明( )。
,即说明( )。 - 作为系统( )。
- 若系统开环频率特性如图所示,p为开环系统具有正实部特征根的数目,未标注时p=0,v为开环中积分环节的个数,则系统的稳定性( )。
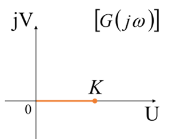
- 比例环节
 的Nyquist图为( )。
的Nyquist图为( )。 - 若系统开环频率特性如图所示,p为开环系统具有正实部特征根的数目,未标注时p=0,v为开环中积分环节的个数,则系统的稳定性( )。
- 一阶惯性系统,T越小,调整时间Ts越( )。
- 由工程控制实践可知,为了使系统有较满意的稳定性储备,一般应使( )。
- 某一系统传递函数为
 ,当输入为
,当输入为 ,其稳态输出的幅值为( )。
,其稳态输出的幅值为( )。 - 当系统所有的特征根均具有负实部,即位于[s]平面的左半平面,则系统( )。
- 某系统的传递函数为
 ,则单位脉冲响应函数为( )。
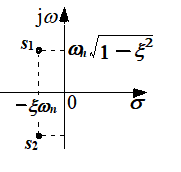
,则单位脉冲响应函数为( )。 - 二阶临界阻尼系统特征根分布为( )。
- 稳定性裕量中,
 曲线与单位圆相交的频率是( )。
曲线与单位圆相交的频率是( )。 - 若系统开环频率特性如图所示,p为开环系统具有正实部特征根的数目,未标注时p=0,v为开环中积分环节的个数,则系统的稳定性( )。
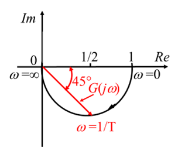
- 零初始条件下,拉氏变换积分定理的数学表达式为( )。
若系统开环频率特性如图所示,p为开环系统具有正实部特征根的数目,未标注时p=0,v为开环中积分环节的个数,则系统的稳定性:( )。
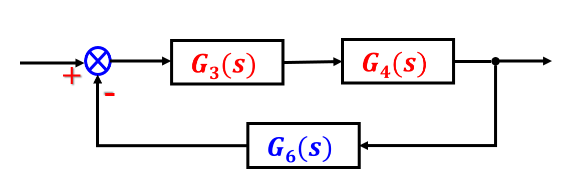
- 系统的结构如图所示,求系统的传递函数为( )。
- 单位速度函数的拉氏变换为( )。
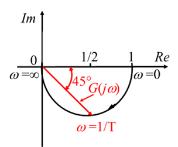
- 一阶微分环节
 的Nyquist图为( )。
的Nyquist图为( )。 - 单位脉冲函数的拉氏变换为( )。
- 延时环节
 的Nyquist图为( )。
的Nyquist图为( )。 - 系统的输出信号对控制作用的影响( )。
A:错 B:对
答案:对
A:错 B:对
答案:对
A:错 B:对
答案:对
A:对 B:错
答案:对
A:对 B:错
答案:错
A:错 B:对
答案:对
A:错 B:对
答案:对
A:对 B:错
答案:错
A:对 B:错
答案:对
A:对 B:错
A:P调节器 B:PD调节器 C:PI调节器 D:PID调节器
A:开环不稳定,闭环稳定 B:开环稳定,闭环不稳定 C:开环稳定,闭环稳定 D:开环不稳定,闭环不稳定
A:闭环不稳定,闭环右半平面有3极点 B:闭环不稳定,闭环右半平面有2极点 C:闭环稳定,闭环右半平面无极点 D:闭环不稳定,闭环右半平面有1极点
A:惯性环节 B:振荡环节 C:一阶微分环节 D:积分环节
A:
 B:
B: C:
C: D:
D:
A:自由响应收敛于常值,系统稳定 B:自由响应发散,系统不稳定 C:自由响应收敛,系统稳定 D:自由响应等幅振动,系统临界稳定
A:
 B:
B: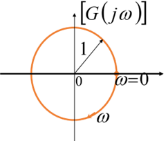 C:
C: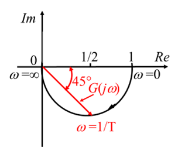 D:
D: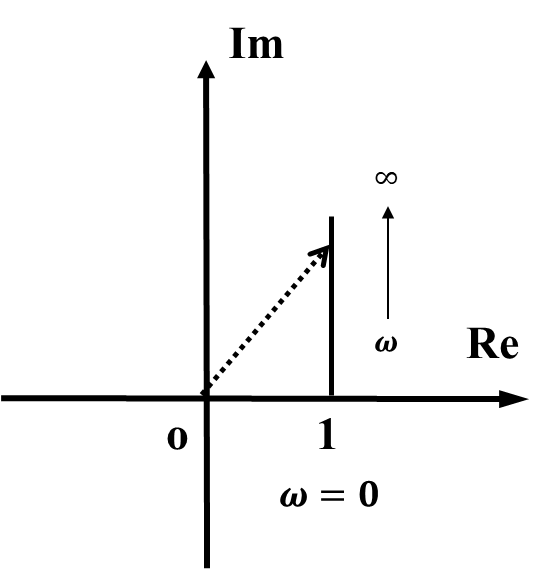
A:20 dB/dec B:-20 dB/dec C:-40 dB/dec D:40 dB/dec
A:开环稳定,闭环不稳定 B:开环稳定,闭环稳定 C:开环不稳定,闭环稳定 D:开环不稳定,闭环不稳定
A:
 B:
B: C:
C: D:
D:
A:
 B:
B: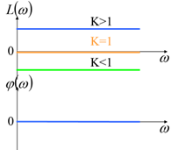 C:
C: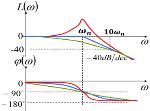 D:
D: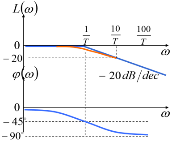
A:输出与误差 B:输出与输入 C:输出与偏差 D:输入与输出
A:0型系统 B:III型系统 C:I型系统 D:II型系统
A:闭环不稳定,闭环右半平面有2极点 B:闭环不稳定,闭环右半平面有3极点 C:闭环稳定,闭环右半平面无极点 D:闭环不稳定,闭环右半平面有1极点
A:自由响应收敛,系统稳定 B:自由响应发散,系统不稳定 C:自由响应等幅振动,系统临界稳定 D:自由响应收敛于常值,系统稳定
A:1 B:5 C:10 D:2
A:0.1 B:0.2 C:0 D:0.5
A:
 B:
B: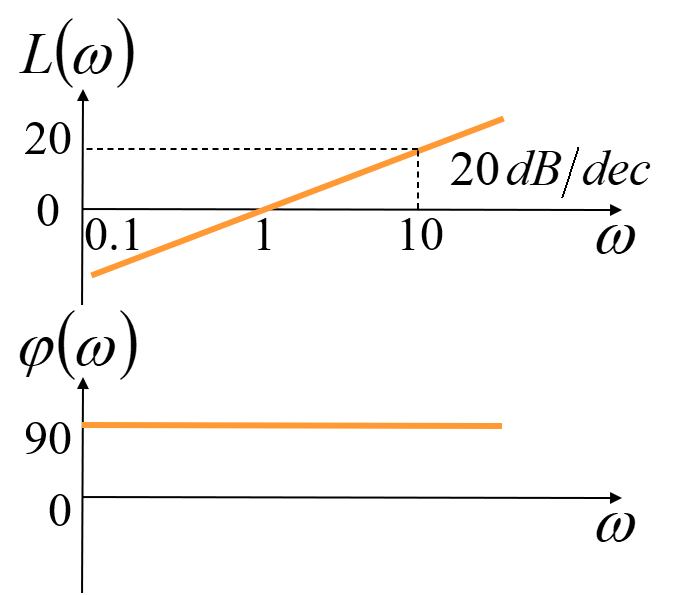 C:
C: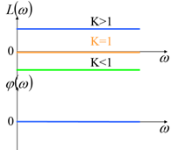 D:
D: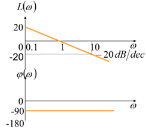
A:
 B:
B: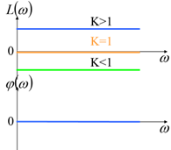 C:
C: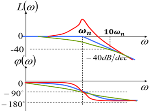 D:
D: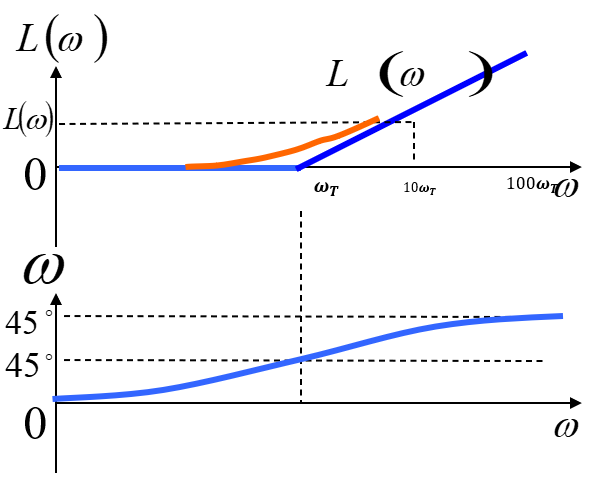
A:系统输入、输出为零 B:输出幅值小于输入幅值 C:输出幅值大于输入幅值 D:输出幅值等于输入幅值
A:闭环一定振荡 B:开环一定振荡 C:闭环不振荡 D:开环不振荡
A:开环不稳定,闭环不稳定 B:开环稳定,闭环不稳定 C:开环稳定,闭环稳定 D:开环不稳定,闭环稳定
A:
 B:
B: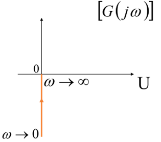 C:
C: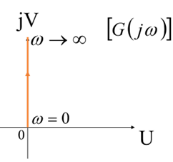 D:
D: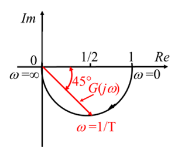
A:开环稳定,闭环不稳定 B:开环稳定,闭环稳定 C:开环不稳定,闭环稳定 D:开环不稳定,闭环不稳定
A:短 B:不变 C:不确定 D:长
A:
 B:
B: C:
C: D:
D:
A:
 B:
B: C:
C: D:
D:
A:自由响应收敛,系统稳定 B:自由响应等幅振动,系统临界稳定 C:自由响应发散,系统不稳定 D:自由响应收敛于常值,系统稳定
A:
 B:
B: C:
C: D:
D:
A:
 B:
B: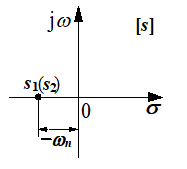 C:
C: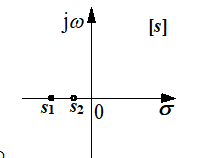 D:
D: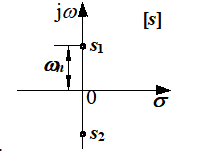
A:截止频率 B:幅值穿越频率 C:相位穿越频率 D:相位交界频率
A:开环稳定,闭环稳定 B:开环不稳定,闭环不稳定 C:开环不稳定,闭环稳定 D:开环稳定,闭环不稳定
A:
 B:
B: C:
C: D:
D:
A:开环稳定,闭环稳定 B:开环不稳定,闭环不稳定 C:开环不稳定,闭环稳定 D:开环稳定,闭环不稳定
A:
 B:
B: C:
C: D:
D:
A:1/s3 B:1/s C:1 D:1/s2
A:
 B:
B: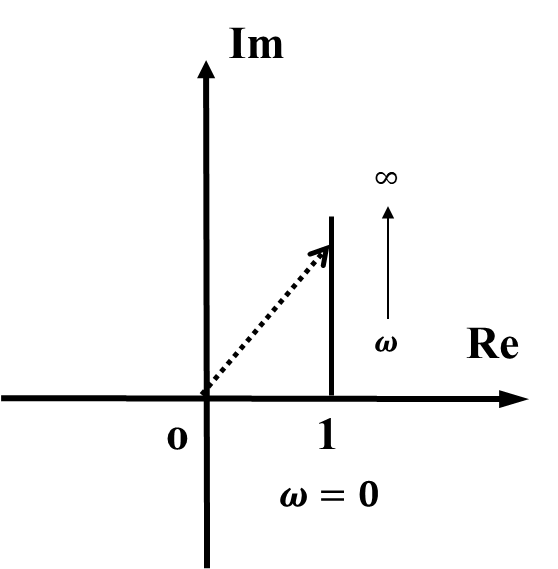 C:
C: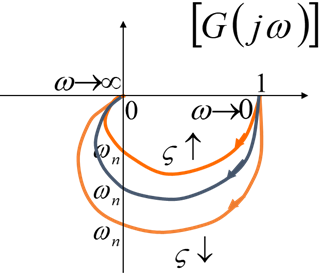 D:
D: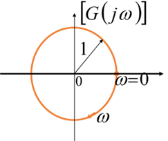
A:1/s B:1/s3 C:1 D:1/s2
A:
 B:
B: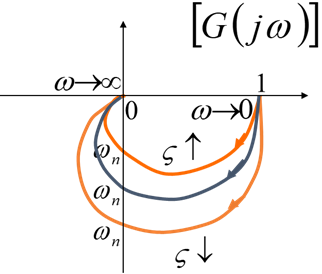 C:
C: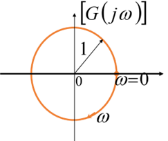 D:
D: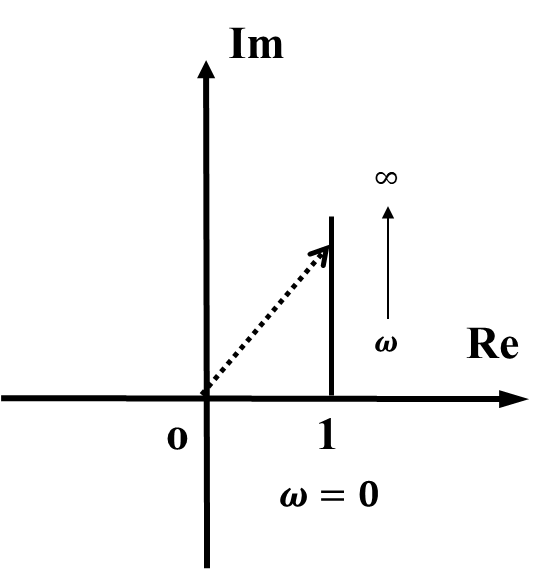
A:开环有 B:都有 C:闭环有 D:都没有
温馨提示支付 ¥5.00 元后可查看付费内容,请先翻页预览!
