上海电力大学
- https://image.zhihuishu.com/zhs/doctrans/docx2html/202112/caae675509f6463d9e48a10709ad32b1.png
- https://image.zhihuishu.com/zhs/doctrans/docx2html/202112/d77c7ad3c7d449c0bd565d2742fc865b.png
- https://image.zhihuishu.com/zhs/doctrans/docx2html/202112/34b3ee51ce4742869ef736ff750cec75.png
- https://image.zhihuishu.com/zhs/doctrans/docx2html/202112/a6a4df81e485454aa119062d0afbc632.png
- https://image.zhihuishu.com/zhs/doctrans/docx2html/202112/b1fc0fd9e28c4b59b3785b2278d572f8.png
- https://image.zhihuishu.com/zhs/doctrans/docx2html/202112/0bd34dfb56a94169b397b4b5908babe1.png
- https://image.zhihuishu.com/zhs/doctrans/docx2html/202112/0bdb6cb8e1f44f839f300d432152475d.png
- https://image.zhihuishu.com/zhs/doctrans/docx2html/202112/c75908684dbe4a6d846b800703dc1fc5.png
- https://image.zhihuishu.com/zhs/doctrans/docx2html/202112/d59fa481245645bd9b6e1bb2b77310e4.png
- https://image.zhihuishu.com/zhs/doctrans/docx2html/202112/6c77128901c940feb3e77cdd85df0dd7.png
- https://image.zhihuishu.com/zhs/doctrans/docx2html/202112/e9166e18e3eb4d32a8458f8df4a7e58d.png
- https://image.zhihuishu.com/zhs/doctrans/docx2html/202112/500014d75bbd4e8da6fbe745f4bbf426.png
- https://image.zhihuishu.com/zhs/doctrans/docx2html/202112/d93c40bb4697434e85ff70d263293cf5.png
- https://image.zhihuishu.com/zhs/doctrans/docx2html/202112/604a5a45a1fa430bbee0db10e6fafd92.png
- https://image.zhihuishu.com/zhs/doctrans/docx2html/202112/e54ed9f641b0405ca868e428495f3099.png
- https://image.zhihuishu.com/zhs/doctrans/docx2html/202112/553d96606a0e4b3aa48c0021f25a8d36.png
- 对于任一有理传递函数,都可以将其转化为对角标准形的状态空间表达式。( )
- 传递函数是系统输出信号的拉氏变换与输入信号的拉氏变换之比。( )
- 已知两个系统互为对偶系统,若其中一个系统是能控的,则另一个系统必然能观。( )
- 状态反馈的设计会影响系统的能控性。( )
- 系统的方框图如图所示:
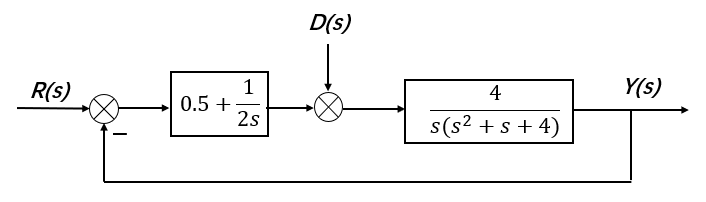
已知r(t)=1+t,d(t)=0.1t*1(t),判断系统的稳定性,求给定稳态误差 和扰动稳态误差
和扰动稳态误差 。( )
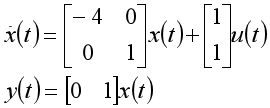
。( ) - 已知系统的状态空间模型为
 ,下列说法正确的是( )。
,下列说法正确的是( )。 - 已知系统的状态空间模型为
 ,下列说法正确的是( )。
,下列说法正确的是( )。 - 某高阶系统的闭环传递函数为
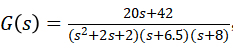 ,其主导极点为( )。
,其主导极点为( )。 - 关于积分控制作用描述正确的是( )。
- 若观察某个PID控制系统的阶跃响应时发现超调量太大,要改善系统响应动态特性,则可以采用的措施有( )。
- 下列关于比例控制作用的描述正确的是( )。
- 某控制系统采用比例型控制器,控制效果较好,在此基础上增加了积分作用,下列说法正确的是( )
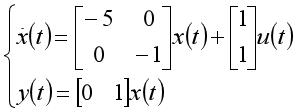
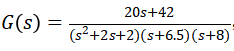
- 已知某系统的状态空间模型为
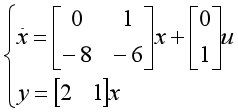 ,下列说法正确的是( )。
,下列说法正确的是( )。 已知系统的状态空间模型为
,下列说法错误的是( )。- https://image.zhihuishu.com/zhs/doctrans/docx2html/202112/a80860a0f4ca48faaf1cbedfd94882cf.png
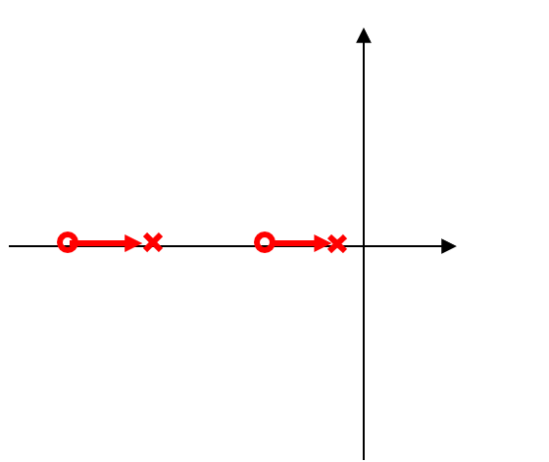
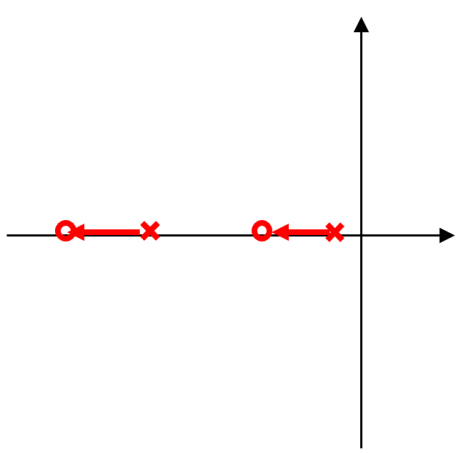
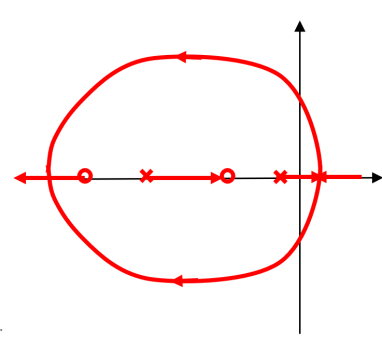
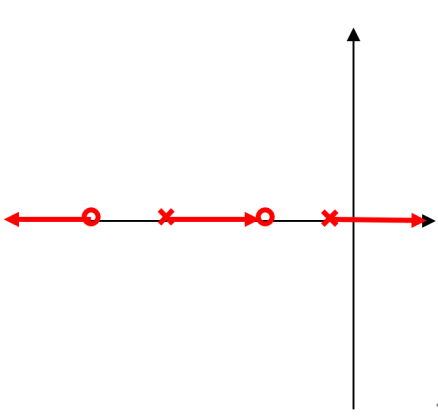
- 已知系统开环零极点分布如图所示,
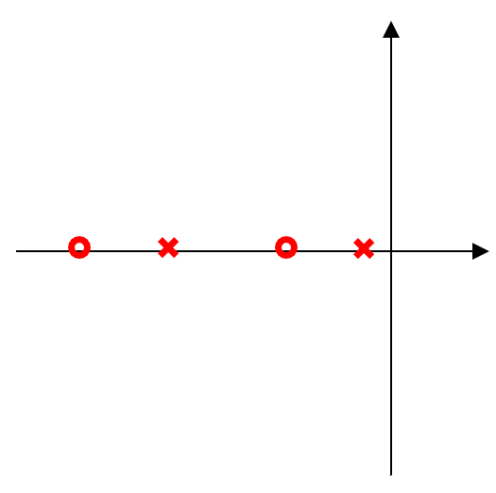
则系统的根轨迹图应为( )。 - 开环传递函数为
 ,则k>0变化下,关于根轨迹的分离点和会合点下列说法正确的是( )
,则k>0变化下,关于根轨迹的分离点和会合点下列说法正确的是( ) - 已知系统的状态空间模型为,下列说法错误的是( )。
- 在采用合适比例调节的控制系统中,现在比例作用基础上适当增加微分作用,则系统设定值阶跃响应的最大动态偏差会( )。
- 某单位负反馈系统的开环频率特性如下表所示:
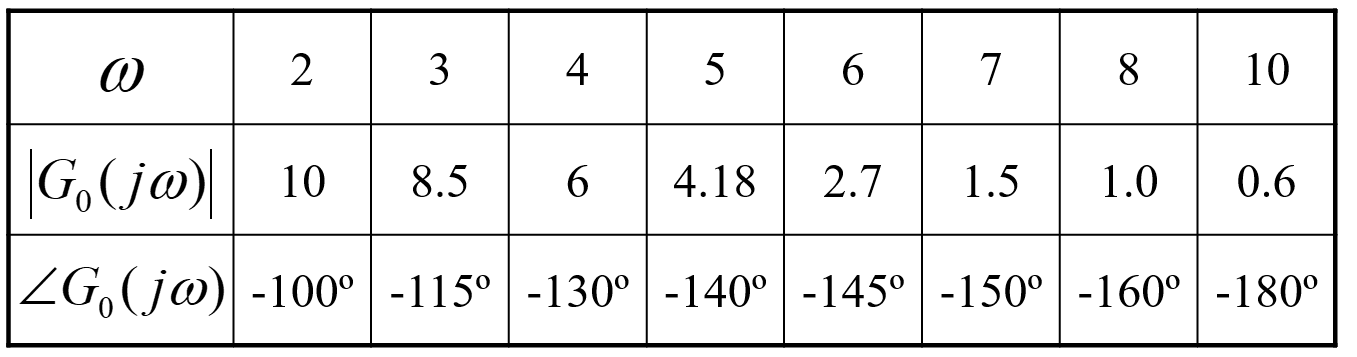
则下列说法正确的是( )。 - 在采用合适比例调节的控制系统中,现在比例作用基础上适当增加微分作用,则系统设定值阶跃响应的调整时间会( )。
- 在采用比例调节的控制系统中,现在比例作用基础上适当增加微分作用,为了得到相同的稳定性,则应当( )控制器的比例系数。
- 对象为0型,现在合适的比例作用基础上适当增加微分作用,则系统设定值阶跃响应的静态偏差会( )。
- 某高阶系统的闭环传递函数为
 ,其阶跃响应的特征为( )。
,其阶跃响应的特征为( )。 - 对于一个PI型控制器,设置( )则相当于控制规律为比例型控制。
- 已知系统的开环频率特性的极坐标图如下图所示:
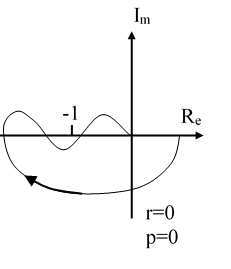
图中r是位于s平面原点的开环极点,p为位于右半s平面的开环极点数,则下面分析正确的是( )。 - 对于一个PD型控制器,设置( )则相当于控制规律为比例型控制。
答案:
答案:
答案:
答案:
答案:
答案:
答案:
答案:
答案:
A:对 B:错
A:错 B:对
A:错 B:对
A:对 B:错
A:系统稳定
B:

C:系统不稳定
D:

E:

F:

A:该系统不存在不能控的状态变量。
B:按能观性结构分析,其不能观子系统有一个状态变量。
C:因为该系统能控,所以无需能控性结构分解。
D:该系统有一个状态变量不能观。
A:系统不稳定。
B:系统的特征根为-4,1。
C:系统的特征根为4,-1。
D:系统稳定。
A:

B:

C:
D:
E:

A:积分输出信号随着时间逐渐增强,控制动作缓慢,故积分作用通常不单独使用。
B:积分作用的特点是,当有偏差存在时,积分输出将随时间增长(或减少);当偏差消失时,输出能保持在某一值上。积分作用具有保持功能,故可以消除余差。
C:积分时间TI越大,积分作用越强
D:积分时间TI越大,积分作用越弱
A:适当增加控制器的微分时间常数Td
B:适当增加控制器的积分时间常数Ti
C:适当减少控制器的比例系数Kp
D:适当减少控制器的微分时间常数Td
E:适当减少控制器的积分时间常数Ti
F:适当增加控制器的比例系数Kp
A:比例系数
 越大,比例控制作用越弱;
越大,比例控制作用越弱;B:比例控制及时、适当。只要有偏差,输出立刻成比例变化,偏差越大,输出的控制作用越强,因而可以做到无差调节。
C:比例控制作用下,控制结果存在静差,调节作用是以偏差存在为前提条件,不可能做到无静差调节。
D:比例系数
越大,比例控制作用越强;A:增加积分作用后,系统的稳态偏差可以消除;
B:增加积分作用后,系统响应动态特性会更好;
C:增加积分作用后,系统调整时间会减少。
D:增加积分作用后,系统调整时间会增加;
A:当期望极点为-3,-10时,设计出的状态反馈矩阵为
 。
。B:当期望极点为-3,-10时,设计出的状态反馈矩阵为
 。
。C:设期望极点为-3,-10,则对应的期望多项式为
 。
。D:设期望极点为-3,-10,则对应的期望多项式为
 。
。A:该系统不能观。
B:该系统稳定。
C:该系统有一个输入变量,一个输出变量。
D:该系统能观。
A:根据系统的闭环特征方程可知当k=0.125时,根轨迹与虚轴有交点。
B:根轨迹与虚轴没有交点。
C:将s=jω代入根轨迹方程,得到k=8时,根轨迹与虚轴交于
 。
。D:无法判断根轨迹是否与虚轴有交点。
A:
B:
C:
D:
A:根轨迹没有分离点和会合点。
B:根轨迹必然在[-5,-3]之间有一个会合点,并且在[-1,0]之间有一个分离点。
C:根轨迹必然在[-3,-1]之间有一个分离点,其它地方没有分离点或者会合点。
D:根轨迹必然在[-1,0]之间有一个分离点,其它地方没有分离点或者会合点。
A:该系统稳定。
B:该系统不稳定。
C:该系统是连续时间系统。
D:该系统有两个状态变量。
A:变小
B:不变
C:变大
A:根据上表数据无法判断剪切频率和相位裕量。
B:系统的剪切频率是
 ,相位裕量
,相位裕量 ,系统稳定。
,系统稳定。C:系统的剪切频率
 ,相位裕量
,相位裕量 ,系统稳定。
,系统稳定。D:系统的剪切频率是
,相位裕量 ,系统不稳定。
,系统不稳定。A:变小
B:变大
C:不变
A:不变
B:增加
C:减小
A:变小
B:不变
C:变大
A:欠阻尼
B:临界阻尼
C:无阻尼
D:过阻尼
A:积分时间常数Ti为0
B:积分时间常数Ti为∞
C:积分时间常数Ti无论如何设置都无法满足
A:系统为1型系统,其闭环系统不稳定
B:系统为0型系统,其闭环系统稳定。
C:系统为0型系统,其闭环系统不稳定。
D:系统为1型系统,其闭环系统稳定。
A:微分时间常数Td为∞
B:微分时间常数Td无论如何设置都无法满足
C:微分时间常数Td为0
温馨提示支付 ¥5.00 元后可查看付费内容,请先翻页预览!