中国农业大学
- 频率特性Nyquist图是实部和虚部的关系曲线( )。
- 一阶系统对阶跃输入信号响应曲线是单调上升的( )。
- 控制系统的性能指标稳定性、快速性和准确性是相互制约的( )。
- 二阶系统对斜波输入信号是无差的,其稳态误差为0( )。
- 系统的相位裕度γ>0时,系统稳定。( )
- 全自动洗衣机是自动控制系统( )。
- 控制系统的性能指标最重要的是快速性( )。
- 二阶振荡系统对单位阶跃信号响应的超调量只与阻尼比有关( )。
- 频率特性图形表达形式有( )。
- 当阻尼比为0.707时,系统的特点是( )。
- 幅频特性确定后,最小相位系统具有( )。
- 影响二阶振荡系统的性能指标的有( )。
- 数字PID控制系统中控制器作用初期容易产生饱和的控制环节是( )。
- 产生非最小相位系统因素有( )。
- 系统的性能指标是对系统校正的评价标准,常见的二阶系统的性能指标包括( )。
- 为减小PID控制系统的稳态偏差,可以采用哪种措施?( )。
- 某开环系统的传递函数为
 ,当串联校正环节
,当串联校正环节 后,请判断如下哪项是正确的。( )
后,请判断如下哪项是正确的。( ) - 频域分析相对于时域分析具有( )。
- 参照系统最优模型对控制器参数进行整定,可以使系统具有( )。
- 时域分析和频域分析分别研究( )。
- 积分环节相位为( )。
- 闭环频率特性性能指标有( )。
- 下列开环传递函数中相位裕度最大的是哪个?( )
- 单位负反馈系统的开环传递函数为:
 试确定
试确定 取()时,系统达到最大相位裕度.( )
取()时,系统达到最大相位裕度.( ) - 单位负反馈系统开环传递函数为
 ,当采用
,当采用 校正,其比例系数为
校正,其比例系数为 时,此时该系统单位阶跃响应的稳态误差
时,此时该系统单位阶跃响应的稳态误差 为( )
为( ) - 在给定信号作用下,对于速度输入信号有差的传递函数是( )。
- 某控制系统的开环传递函数为
 ,那么该系统的开环增益
,那么该系统的开环增益 为( )
为( ) - 将控制系统的输出信号由输出端返回到输入端,这个环节称为( )。
- 对于二阶系统如果特征根为共轭复数,其单位阶跃信号输出响应为( )。
- Bode稳定判据中,P为开环传递函数在[s]平面的右半平面的极点数。闭环系统稳定时,在开环对数幅频特性为正值的频率范围内,开环对数相频特性对-180°线正穿越与负穿越次数的差值为( )。
- 高阶系统最优模型中,幅频特性在低频段的斜率为( )。
- 利用梅森公式求图示信号流图的总增益 ( )
- 在谐波信号输入下,系统的频率响应是( )。
- 系统的传递函数为
 ,请问如下哪个校正环节可以在输入信号为
,请问如下哪个校正环节可以在输入信号为 时的稳态误差为0.01的同时,使系统相位裕度为
时的稳态误差为0.01的同时,使系统相位裕度为 ( )
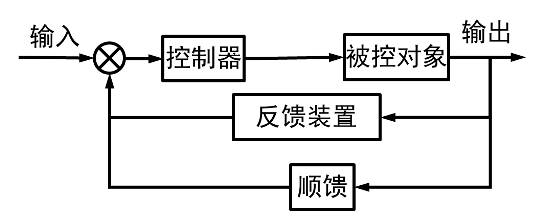
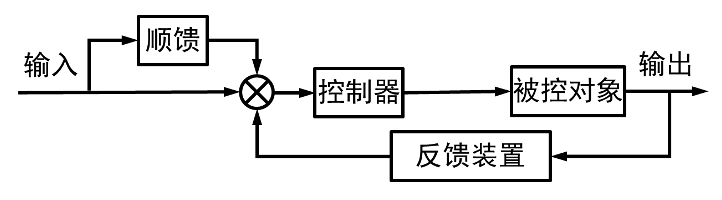
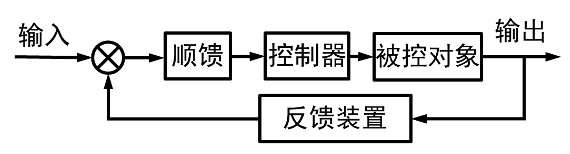
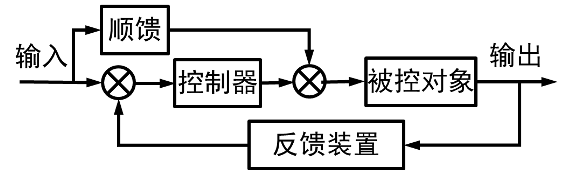
( ) - 以下哪个控制框图为顺馈校正的控制框图( )
- 数字PID控制系统中系统输出第一次达到稳态值时容易产生饱和的控制环节是( )。
- 对于开环系统和闭环系统的输出,哪种情况是正确的( )。
- Routh稳定判据中,Routh表第一列有2次符号变化,则( )。
- 在干扰信号作用下,减小或消除误差的方法是( )。
已知负反馈系统的开环传递函数为
 ,则该系统的闭环特征方程为 ( )。
,则该系统的闭环特征方程为 ( )。- 对于开环系统和闭环系统抗干扰能力( )。
- 在给定信号作用下,使0型系统误差为0的输入信号是( )。
- 适合应用传递函数描述的系统是 ( )。
A:对 B:错
答案:错
A:对 B:错
答案:对
A:错 B:对
答案:对
A:对 B:错
答案:错
A:对 B:错
答案:对
A:对 B:错
答案:错
A:对 B:错
答案:错
A:对 B:错
答案:对
A:代数方程
B:Bode图
C:频率特性
D:Nyquist图
答案:Bode图###Nyquist图###频率特性
A:不产生谐振
B:超调量较小
C:上升时间最小
D:调节时间最小
A:相位变化较大
B:相位不变化
C:传递函数可唯一确定
D:相位变化最小
A:固有频率
B:谐振频率
C:有阻尼固有频率
D:阻尼比
A:比例控制
B:没有环节产生饱和
C:微分控制
D:积分控制
A:不稳定的惯性环节
B:惯性环节
C:延时环节
D:一阶微分环节
A:
B:

C:

D:
A:增加比例控制器控制作用
B:减小积分控制器控制作用
C:减小比例控制器控制作用
D:增加积分控制器控制作用
A:校正后系统的穿越频率为47.3dB/dec
B:校正后系统的相角裕度约为51°
C:校正前系统的相角裕度约为20°
D:校正前系统的穿越频率为8.9dB/dec
A:方便地判别系统的稳定性和稳定储备量
B:获取的是系统的稳态特性
C:易于确定系统工作频率范围
D:容易对系统进行校正
A:较大的相位裕度
B:较小的稳态误差
C:较好的噪声抑制特性
D:较小的幅值裕度
A:频域分析则是研究对谐波信号的瞬态响应
B:时域分析研究对于典型输入信号的瞬态响应
C:频域分析则是研究对谐波信号的稳态响应
D:时域分析研究对于典型输入信号的稳态响应
A:180°
B:-180°
C:-90°
D:+90°
A:截止频率与频宽
B:幅值穿越频率
C:谐振频率与谐振峰
D:相频穿越频率
A:
B:
C:
D:
A:
B:
C:
D:无论取何值都不能达到最大相位裕度
A:
B:

C:

D:0
A:0型开环传递函数
B:Ⅰ型开环传递函数
C:Ⅰ型闭环传递函数
D:0型闭环传递函数
A:2
B:1
C:10
D:5
A:执行环节
B:反馈环节
C:比较环节
D:放大环节
A:单调下降曲线
B:单调上升曲线
C:衰减振荡曲线
D:等幅振荡曲线
A:2P
B:P/2
C:0
D:P
A:-20dB/dec
B:-40dB/dec
C:0dB/dec
D:+20dB/dec
A:




A:时间响应中的瞬态响应
B:与时间响应无关
C:时间响应中的稳态响应
D:时间响应中的稳态响应和瞬态响应
A:
 .
.B:
C:
D:
A:
B:
C:
D:
A:积分控制
B:没有环节产生饱和
C:比例控制
D:微分控制
A:开环系统输出一定不振荡
B:开环系统输出一定振荡
C:闭环系统输出一定不振荡
D:闭环系统输出一定振荡
A:系统的2个特征根有负实部,系统稳定
B:系统的特征根均有负实部,系统不稳定
C:系统的2个特征根有正实部,系统不稳定
D:系统的特征根均有负实部,系统稳定
A:在干扰作用之后增加环节的积分个数
B:在干扰作用之前增加一阶微分环节
C:在干扰作用之前增加环节的积分个数
D:在干扰作用之后增加一阶微分环节
A:
与是否为单位反馈系统有关



A:开环系统强
B:开环系统与闭环系统都不强
C:开环系统与闭环系统一样强
D:闭环系统强
A:单位斜波信号
B:单位阶跃与单位斜波信号
C:单位阶跃信号
D:单位抛物线信号
A:单输入,单输出的定常系统;
B:单输入,单输出的线性定常系统;
C:非线性系统。
D:单输入,单输出的线性时变系统;
温馨提示支付 ¥5.00 元后可查看付费内容,请先翻页预览!