1.足式行走机构,在行走过程中,机身重心的垂直投影始终落在支承足落地点垂直投影所形成的多边形内。( )
A:错
B:对
答案:对
2.现有的工业机器人大多采用示教再现这种示教方式。( )
A:错
B:对
答案:对
3.机器人的结构与传统的机械相比,所用的零件和材料以及装配方法等与现有的各种机械完全不同。( )
A:错
B:对
答案:错
4.四足步行机构在运动的任一时刻至少应有三条腿与地面接触,以支撑机体。( )
A:对
B:错
答案:对
5.液压驱动的输出力和功率很小。( )
A:对
B:错
答案:错
6.RAPID语言程序中,TRUNC(1.8)结果为2。( )
A:错
B:对
答案:错
7.接近觉传感器可做精确测量。( )
A:错
B:对
答案:错
8.例行程序中,机器人控制夹爪张开后,需要加等待时间指令。( )
A:对
B:错
答案:对
9.工业机器人红外测距是不接触测距。( )
A:错
B:对
答案:对
10.弹簧式手部就是靠弹簧力的作用将工件夹紧,手部不需要专用的驱动装置,结构比较简单。( )
A:对
B:错
答案:对
11.等待传送带物料到位信号的指令为waittime。( )
A:对
B:错
A:错 B:对 13.重复精度指在相同的运动位置命令下,机器人连续若干次运动轨迹之间的误差度量。( )
A:错 B:对 14.所有的手腕都必须具备三个自由度。( )
A:对 B:错 15.激光式接近觉传感器可用作远距离测量。( )
A:错 B:对 16.滑觉传感器用于把握最佳的抓握力。( )
A:对 B:错 17.调用例行程序使用procall指令。( )
A:错 B:对 18.气源装置是获得压缩空气的装置,其主体部分是空气压缩机。( )
A:错 B:对 19.机器人多数将腕部结构的驱动部分安排在机座上。( )
A:对 B:错 20.工业机器人位置伺服功能不包含轨迹规划。( )
A:错 B:对 21.RAPID语言中,偏移功能函数offs(P1,x,y,z),其中P1为基准点位的名字,x为沿X轴方向偏移的距离,y为沿Y轴方向偏移的距离,z为沿Z轴方向偏移的距离。( )
A:错 B:对 22.磁力类手爪主要是磁力吸盘,真空类手爪主要是真空式吸盘,这两类手爪都是无指手爪。( )
A:对 B:错 23.本体质量又称为承载能力,是机器人在规定的性能范围内,机械接口处能承受的最大负载重量。( )
A:对 B:错 24.工业机器人控制系统决定机器人的运动轨迹。( )
A:错 B:对 25.使机器人准确到达示教目标点点位,转弯半径应设定为fine。( )
A:对 B:错 26.两个向量的加法运算就是把两个向量的模相加。( )
A:错 B:对 27.工业机器人的位置自由度用来确定在空间中的具体方位。( )
A:错误 B:正确 28.在采用位置矢量描述点的位置,用旋转矩阵描述物体方位的基础上,物体在空间的位姿就由位置矢量和旋转矩阵共同表示。 ( )
A:错 B:对 29. 码垛程序中最容易出错法人地方是等待指令。( )
A:错误 B:正确 30.直角坐标型机器人通过三个相互垂直轴线上的移动来改变手部的空间位置。( )
A:错 B:对 31.通常我们称拥有三个连杆的操作臂为RRR(或3R)机构。( )
A:错误 B:正确 32.控制系统根据控制运动的形式可分为点位控制和轨迹控制。( )
A:正确 B:错误 33.工业机器人的姿态自由度是确定物体的指向。( )
A:错误 B:正确 34.一般姿态的描述可以用___、俯仰和侧摆三轴的转角来实现。
35.单自由度回转运动手腕的特点___、___、___、___、___。
36.如果H为手坐标系,用以描述手的姿态,那再加上手的位置就构成了手的___。
37.___是区别第二代机器人与第一代机器人的重要特征。
38.常用标定工业机器人工具坐标系的方法为( )
A:ABC世界坐标法 B:ABC2点法 C:XYZ参照法 D:XYZ4点法 39.示教编程器的作用是( )。
A:各种状态和控制命令的输人或输出 B:记录需要输出的各种信息 C:与主计算机之间以串行通信方式实现信息交互 D:由各种操作按键、状态指示灯构成 40.工具坐标是以下哪个单词进行命名的( )
A:base B:tool C:number D:mode 41.工业机器人只有按照夹持方式一种分类方式。( )
A:错 B:对 42.夹钳式手部的传动机构分为回转型和平移型两大类。( )
A:对 B:错 43.如下代码中,需要示教的点位有( )。
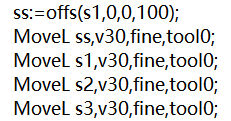
A:S3 B:s2 C:ss D:s1 44.机器人学原则包括:( )
A:机器人不得伤害人或由于故障而使人遭受不幸 B:机器人应能保护自己的生存,只要这种保护行为不与第一或第二原则相矛盾 C:机器人在自己受到严重威胁时可以反击伤害人类 D:机器人应执行人们下达的命令,除非这些命令与第一原则相矛盾 45.工业机器人按手腕分类有( )。
A:三自由度手腕 B:二自由度手腕 C:四自由度手腕 D:单自由度手腕 46.焊接指令中的焊接方式包含以下哪种( )
A:直流 B:交流 C:脉冲 D:驱动 47.工业机器人“四大家族”品牌是( )。
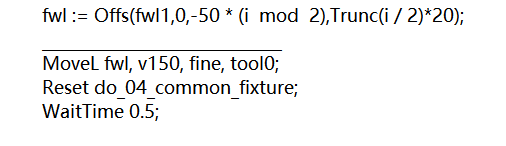
A:FANUC B:KUKA C:ABB D:安川 48.根据下列程序中,补充放物料代码,横线处可使用代码有( )。
A: B: C: D: 49. 下面哪种传感器不属于触觉传感器( )
A:接触觉传感器 B:接近觉传感器 C:热敏电阻 D:压觉传感器 50.手部的位姿是由哪两部分变量构成的?( )
A:位置与运行状态 B:姿态与速度 C:位置与速度 D:姿态与位置 51.当代机器人大军中最主要的机器人为( )。
A:服务机器人 B:特种机器人 C:工业机器人 D:军用机器人 52.摄像机标定的方法有以下哪些?( )
A:基于被动视觉的标定技术 B:自标定技术 C:基于主动视觉的标定技术 D:传统的标定技术 53.工业机器人驱动方式主要有( )。
A:气动式 B:液压式 C:电磁式 D:电动式 54.工业机器人的手部特点主要有( )。
A:手部是机器人末端操作器 B:手部的通用性比较差 C:手部与手腕相连处可拆卸 D:手部是一个独立的部件 55. 工作范围是指机器人___或___中心所能到达的点的集合。( )
A:手臂末端 B:机械手 C:手臂 D:手腕 56.机器人视觉系统工作过程有( )。
A:处理 B:输出 C:传送 D:拍摄 57.以下哪些是工业机器人常用行业应用?( )
A:搬运 B:喷涂 C:焊接 D:水下探测 58.按机器人的应用领域分类,将机器人分为三大类,即( )。
A:直角坐标 B:工业机器人 C:服务型机器人 D:特种机器人 59.末端执行器级编程的特点有( )。
A:适用于直角坐标型机器人和圆柱坐标型机器人 B:不适用于对具有回转关节的关节型机器人 C:允许有简单的条件分支,有感知功能,可以选择和设定工具 D:有时还有并行功能,数据实时处理能力强 60.通常可将工业机器人的发展分为哪几代?( )
A:示教再现型机器人 B:智能机器人 C:有感觉的机器人 D:类人型机器人 61.世界上工业机器人的四大家族是( )
A:德国的库卡 B:美国的AMF C:日本的安川电机 D:日本的发那科 E:瑞士的ABB 62.机器人通信中干线长度一般为( )。
A:500米 B:1000米 C:100米 D:200米 63.一般来讲,为了让机器人的手爪或末端操作器可以达到任务目标,手臂至少能够完成三个运动:( )。
A:垂直移动 B:径向移动 C:左右摆动 D:回转运动 64.以下属于液压驱动的执行元件为( )。
A:液压缸 B:液压马达 C:液压泵 65.简述什么是工作空间?[参考答案] 又称工作范围、工作区域是指机器人末端执行器运动描述参考点所能达到的空间点的集合,一般用_____和________的投影表示。( )
A:斜面 B:球面 C:水平面 D:垂直面 66.机器人视觉系统特点包括( )。
A:不易实现集成 B:非接触测量 C:灵活、适应性强 D:成本低、效率高 67.较为典型的特殊气缸有( )。
A:冲击式气缸 B:薄膜式气缸 C:气液阻尼缸 68.常用的夹持类手部有:( )
A:夹钳式 B:钩托式 C:磁吸式 D:弹簧式 69.以下哪类手爪是无指手爪( )
A:夹钳式手部 B:勾托式手部 C:真空式吸盘 D:磁力吸盘 70.离线编程的优点( )。
A:离线编程优点 B:使编程者远离了危险的工作环境 C:可通过计算机生成复杂的项目程序,可模拟验证程序是否正确;配合机械设计验证项目结构 D:减少机器人的停机时间 71.离线编程的缺点( )。
A:需要实际机器人系统和工作环境 B:如果现场实际情况与模拟3D模型误差较大,难以形成准确的轨迹 C:并非所有机器人都可提供离线编程软件,且部分编程软件价格昂贵 D:对实际的机器人进行示教时要占用机器人 72.工作速度是指机器人在工作载荷条件下、匀速运动过程中,机械接口中心或工具中心点在单位时间内所移动的( )。
A:转动的角度 B:距离 C:速度 D:转动加速度 73.机器人的吸附式手部靠吸附力取料,根据吸附力的不同手部有:( )
A:磁吸附 B:夹钳式 C:气吸附 D:勾托式 74.下列机器人应用场景中属于点控制的是( )。
A:探伤 B:涂胶 C:弧焊 D:电焊 75.以下属于机器人点控制的特点的是( )。
A:可用于弧焊 B:轨迹必须平滑 C:用于离散的点位控制 D:与路径有关 76.不属于直射式光电开关组成的是 ( )。
A:反射镜 B:光发射器 C:光接收器 77.( )通常由内部传感器模块和外部传感器模块组成,用以获取内部和外部环境状态中有意义的信息。
A:人—机交互系统 B:机器人—环境交互系统 C:机械结构系统 D:感受系统控制系统 78.自2013年开始( )成为全球工业机器人最大市场。
A:美国 B:韩国 C:中国 D:日本 79.机器人示教器中不存在( )。
A:触摸屏 B:快捷功能键 C:操纵杆 D:红外线接收器 80.ABB的RAPID语言中,( )为目标位置数据类型,存放的目标点的坐标值及各坐标旋转角度。
A:VAR B:Num C:CONST D:Robtarget 81.接触觉传感器的作用是( )。
A:识别物体的形状、质量 B:感知物体的移动速度 C:测量物体的加速度 D:测量物体的相对距离 82.手腕的侧摆和俯仰用字母( )表示。
A:B B:R C:L D:D 83.以下属于机器人连续控制的特点的是( )。
A:与路径有关 B:用于离散点位控制 C:可用于所有焊接 D:轨迹精确度不高 84.车轮的形状或结构形式取决于地面的性质和车辆的承载能力。在室外路面行驶的车轮大多选用的是( )。
A:实心钢轮 B:实心轮胎 C:无缘轮 D:充气轮胎 85.( )是在工业生产中使用的机器人的总称,主要用于完成工业生产中的某些作业。
A:直角坐标 B:服务型机器人 C:工业机器人 D:特种机器人 86.( )是进行机器人的手动操纵、程序编写、参数配置以及监控的手持装置。
A:机械臂 B:示教器 C:控制柜 D:遥控器 87.以下不属于液压系统组成为( )。
A:气动元件 B:动力元件 C:控制元件 D:执行元件 88.工业机器人中,实现人机交互的部件为( )。
A:机器人本体 B:示教器 C:机器人控制柜 D:连接电缆 89.电位器是一种机电元件,他靠什么在电阻体上的滑动,取得与电刷位移成一定关系的输出电压。( )。
A:电阻 B:换向器 C:电刷 90.( )提出要“围绕汽车、机械、电子、危险品制造、国防军工、化工、轻工等工业机器人、特种机器人,以及医疗健康、家庭服务、教育娱乐等服务机器人应用需求,积极研发新产品,促进机器人标准化、模块化发展,扩大市场应用。”
A:“十三五”国家战略性新兴产业发展规划 B:中国制造2025 C:机器人产业发展规划(2016-2020年) D:“十三五”规划纲要 91.直流伺服电机的励磁方式为( )。
A:他励 B:复励 C:串励 D:并励 92.以下不属于直流伺服电动机根据控制方式为( )。
A:磁场控制 B:定子控制 C:电枢控制 93.关闭激光使用指令( )。
A:MoveL B:MoveJ C:reset D:set 94.工业机器人的驱动系统电能或流体能等转换成( )。
A:电能 B:流体能 C:机械能
温馨提示支付 ¥3.00 元后可查看付费内容,请先翻页预览!