临沂大学
- 对一个系统,只能选取一组状态变量。( )
- 最优是相对于某一指标而言的。( )
- 对多输入多数出系统,如果 (sI-A)-1B存在零极点对消,则系统一定不可控。( )
- 对系统
 ,其Lypunov意义下的渐近稳定性和矩阵A的特征值都具有负实部是一致的。( )
,其Lypunov意义下的渐近稳定性和矩阵A的特征值都具有负实部是一致的。( ) - 描述系统的状态方程不是唯一的。( )
- 动态规划方法保证了全过程性能指标最小,但并不能保证每一段性能指标最小。 ( )
- 非线性系统在有些情况下也满足叠加定律。( )
- 任一线性连续定常系统的系统矩阵均可对角形化。( )
- 对于线性定常连续系统,就传递特征而言,带状态观测器的反馈闭环系统完全等效于同时带串联补偿和反馈补偿的输出反馈系统。( )
- 线性系统的状态转移矩阵中
 是唯一的。 ( )
是唯一的。 ( ) - 对单输入单输出系统,如果C(sI-A)-1B存在零极点对消,则系统一定不可控或者不可观测。( )
- https://image.zhihuishu.com/zhs/doctrans/docx2html/202107/1e5b6bece2a34b4296e8553174469191.png
- 对线性连续定常系统,非奇异变换后的系统与原系统是代数等价的。( )
- 对于线性连续定常系统,用观测器构成的状态反馈系统和状态直接反馈系统具有相同的传递的数矩阵。( )
- 给定一个标量函数
 一定是正定的( )
一定是正定的( ) - 若A、B是方阵,则必有e(A+B)t=eAteBt成立。( )
- 动态规划方法给出的是最优控制的充分条件而非必要条件。( )
- 采用理想采样保持器进行分析较实际采样保持器方便。( )
- 对不能观测的系统状态可以设计降维观测器对其观测。( )
- 通过全维状态观测器引入状态反馈来任意配置系统的闭环极点时,要求系统必须同时可控和可观测。( )
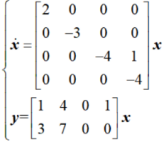
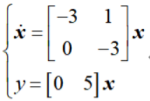
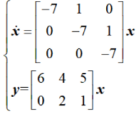
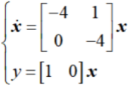
- 下列系统具有能观性的有( )。
- 关于系统平衡状态,以下说法正确的是( )
- 求齐次状态方程的解是方法有( )
- 传递函数G(s)转化为约当型规范形的条件是( )
- 非齐次状态方程的解可以认为是( )
- 关于动态方程线性变换矩阵,下列说法正确的是? ( )
- 求非齐次状态方程的解是方法有( )
- 关于输出方程,下列哪些做法是正确的? ( )
- 现代控制理论已经应用在哪些领域( )
- 利用传递函数方框图来建立其动态方程,以下说法正确的是( )
- 线性定常系统的状态解析表达式中包含( )
- 关于状态方程的特性,哪些说法是正确的?( )
- 在控制科学的意义下,以下不属于现代控制理论主要研究的科学问题?( )
- 下列说法正确的是( )
- 下面关于离散系统状态空间描述方程的解说法错误的是( )。
- 关于线性系统与非线性系统说法正确的是( )。
- 具有相同输入输出的两个同阶线性时不变系统为代数等价系统,下列不属于代数等价系统基本特征的是( )。
- 下面关于线性非奇异变换x=Pz说法错误的是( )。
- 下面关于时不变线性系统的控制综合说法正确的是( )。
- 下面关于状态矢量的非奇异线性变换说法不正确的是( )。
- 已知
 ,且
,且 ,则
,则 ( )。
( )。 - 下面关于两类Cauchy 问题的等价性说法错误的是( )。
- 下面关于稳定线性系统的响应说法正确的是( )。
- https://image.zhihuishu.com/zhs/doctrans/docx2html/202107/11b720d944bc44f98edd452dd7bebd93.png
- 零输入响应渐近趋近原点的条件是( )。
- 下面关于线性时不变系统的系统矩阵说法错误的是( )。
- 下列关于系统的连接说法错误的是( )。
- 下面关于线性连续定常系统的最小实现说法中( )是不正确的。
- 下面关于线性连续系统的状态转移矩阵表述错误的是。( )
- 下面关于线性时不变系统的观测器说法正确的是( )。
- 已知时变系统的状态转移矩阵为,则
 等于( )。
等于( )。 - 系统y(1)+3y(1)+10=u(1)的类型是( )。
- 下面关于系统矩阵的化零多项式与最小多项式说法错误的是( )。
A:对 B:错
答案:错
A:错 B:对
答案:对
A:错 B:对
答案:错
A:对 B:错
答案:对
A:错 B:对
答案:对
A:对 B:错
答案:A: 对
A:对 B:错
答案:错
A:对 B:错
答案:错
A:对 B:错
答案:对
A:对 B:错
A:错 B:对
A:错 B:对
A:错 B:对
A:错 B:对
A:错 B:对
A:错 B:对
A:错 B:对
A:对 B:错
A:错 B:对
A:对 B:错
A:
B:
C:
D:
A:非线性系统可能只有一个平衡状态。
B:线性定常系统有多个平衡状态。
C:线性定常系统只有唯一一个平衡状态。
D:非线性系统有可能有多个平衡状态。
A:拉普拉斯变换法
B:分解法.
C:构造法
D:幂级数法
A:含有m个相同实极点
B:含有n个相异实极点
C:有n个实极点,且不存在相同实极点
D:不仅含有相异实极点,还含有相同实极点
A:零状态的解+零输入的解
B:零初值状态的解+零输入的解
C:齐次方程的解+零初值状态的解
D:齐次方程的解+零输入的解
A:线性变换矩阵可任意选取
B:线性变换矩阵是唯一的
C:线性变换矩阵是不唯一的
D:线性变换矩阵是非奇异的
A:拉普拉斯变换法
B:定义法.
C:积分法
D:幂级数法
A:输出方程可以是只含状态变量的代数方程
B:输出方程可以是二阶微分方程
C:输出方程是代数方程
D:输出方程可以是一阶微分方程
A:机器人控制
B:倒立摆稳定控制
C:航天航空领域
D:工业领域
A:得到的输出方程是不唯一的
B:得到的状态方程是唯一的
C:得到的输出方程是唯一的
D:得到的状态方程是不唯一的
A:初始状态
B:状态转移矩阵
C:输入
D:过去时刻的状态
A:状态方程具有唯一性
B:状态方程不含有任意阶输入变量的导数
C:状态方程是惟一的
D:状态方程可以含有一阶输入变量的导数
A:仿真
B:控制理论方法
C:数学建模
D:实验
A:状态变量可以任意多选
B:状态变量可以任意多选,只要满足线性无关
C:状态向量的个数是唯一的
D:状态向量的个数不是唯一的
A:线性系统解的自由运动和强近运动分别与零状态响应和零输入响应一一对应。
B:线性时不变离散系统的系统矩阵G对解的收敛性起到决定性的作用。
C:解析法是针对线性系统的,其解分成两部分,一部分是零状态响应,一部分是零输入响应。
D:递推迭代法适用于所有定常、时变和非线性情况,但并不一定能得到解析解。
A:因为初始条件与冲激输入的效果是完全等效,所以将Σ=(A,B,C, B:系统中含有非线性元件的系统一定是非线性系统。
C:非线性方程一定表示非线性系统。
D:凡是输入和状态关系满足叠加性的系统就是线性系统。
E:在任何情况下都看成线性系统。
A:相同能控能观性
B:相同稳定性
C:相同的状态空间描述
D:相同特征多项式和特征值
A:对于线性定常系统,线性非奇异变换不改变系统的状态空间描述。
B:对于线性定常系统,线性非奇异变换不改变系统的特征值。
C:非奇异变换阵P是同一个线性空间两组不同基之间的过渡矩阵。
D:对于线性定常系统,线性非奇异变换不改变系统的传递函数。
A:基于观测器的状态反馈实际是输出动态反馈。
B:不可控的系统也是不可镇定的。
C:基于极点配置实现状态反馈控制一定可以使系统稳定。
D:不可观的系统一定不能通过基于降维观测器的状态反馈实现系统镇定。
A:同一线性时不变系统的两个状态空间描述不可以非奇异线性变换互相转换。
B:非奇异线性变换后的系统运动模态不变。
C:对状态矢量的线性变换实质是换基。
D:非奇异线性变换后的系统特征值不变。
A:A

B:
TAC:A
TD:AT
A:冲激输入与初始条件效果是等效的。
B:系统的初始能量可以是以往积累的结果,也可以是瞬时冲激脉冲提供。
C:零初始条件下,冲激输入的效果与一个只靠释放初始内部能量而动作的自由运动系统的效果是一样的。
D:一个非零初值条件的系统,一定不能用零初始条件系统替代说明问题。
A:线性系统暂态响应是零输入响应的一部分。
B:离零点最近的极点在输出响应中所表征的运动模态权值越大。
C:线性系统的响应包含两部分,一部是零状态响应,一部分是零输入响应。
D:线性系统的零状态响应是稳态响应的一部分。
A:
B:
C:
D:
A:
B:
C:
D:
A:系统矩阵的形式决定着系统的稳定性质。
B:系统矩阵不同,系统特征值可能相同。
C:由系统矩阵可以得到系统的运动模态。
D:具有相同特征值的系统矩阵,鲁棒稳定性是一样的。
A:假设反馈连接中所有求逆均存在,若组成反馈系统的传递函数都是真的,则反馈连接也是真的
B:假设反馈连接中所有求逆均存在,若组成反馈系统的传递函数都是真的,则反馈连接不一定是真的
C:若并联的子系统均为真的,则并联后的系统也是真的
D:若串联的子系统均为真的,则串联后的系统也是真的
A:最小实现的方式是不唯一的,有无数个。
B:最小实现的系统是能观且能控的。
C:最小实现的系统是稳定的。
D:最小实现的维数是唯一的。
A:
B:

C:状态转移矩阵不唯一
D:

A:观测器观测的状态在任意时刻与原系统的状态是相等的。
B:全维观测器要比降维观测器简单。
C:观测器只有在不能观的部分渐近稳定时才存在。
D:观测器在任何情况下一定存在。
A:
B:
C:
D:
A:非集中参数、线性、动态系统。
B:集中参数、非线性、动态系统。
C:集中参数、线性、动态系统.。
D:集中参数、非线性、静态系统。
A:循环矩阵的特征多项式与最小多项式之间只差一个倍数。
B:化零多项式有无穷个,并且均可被其最小多项式整除。
C:Caley-Hamilton定理给出了一个系统矩阵的化零多项式。
D:最小多项式是所有化零多项式中首项系数为1的多项式。
温馨提示支付 ¥5.00 元后可查看付费内容,请先翻页预览!