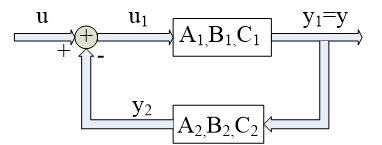
- 带状态观测器的状态反馈系统,观测器的极点会全部被闭环系统的零点相消。( )
- 带状态观测器的状态反馈系统,闭环系统的极点等于直接状态反馈的极点和状态观测器的极点之和。( )

- 若一个系统是李亚普诺夫意义下稳定的,则该系统在任意平衡状态处都是稳定的。( )
- 单输入单输出系统可进行任意极点配置的充分必要条件是系统完全能观。( )
- 现代控制理论采用时域分析方法,以一阶微分方程组作为数学模型。( )
- 任一线性定常系统都可通过线性变换得到能控标准型。( )
- 线性定常系统,状态反馈可镇定的充要条件是不能控子系统渐近稳定。( )
- 下列属于系统的状态观测器存在的充分必要条件是( )。
- 基于能量的稳定性理论是由( )构建的。

- 对于一个n 维的线性定常连续系统,若其完全能观,则利用状态观测器实现的状态反馈闭环系统是( )维的。
- 线性定常系统能控且能观,则可通过输出反馈进行任意的极点配置。( )
- 系统能控性和输出无关,故可仅考察状态方程。( )
- 系统状态的转移是双向的、可逆的。( )
- 对于外部稳定的系统,有限的输入,只能产生有限的系统输出。( )
- 若系统按能控、能观性结构分解,其对应的矢量结构图中的输入输出之间仅有一条前向通道。( )
- 线性定常系统,引入反馈结构( )可以改变系统的特征值。
- 引入状态反馈后,系统的维数不发生变化。( )
- 选择不同的能观性分解矩阵,系统得到的能观子空间状态空间表达式不同,维数也不同。( )
- 对线性定常连续系统进行离散化,使用的保持器为零阶保持器。( )
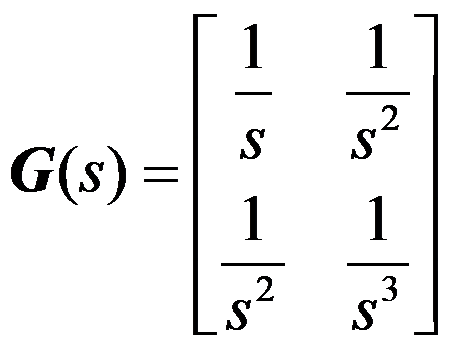
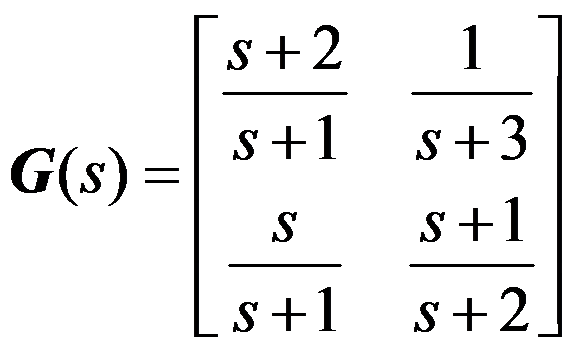
- 对于线性定常系统的传递函数阵,下列表述正确的有( )。

- 经典控制理论中没有能控性和能观性的概念。( )
- 一个系统的平衡状态可能有多个,因此系统的李亚普诺夫稳定性与系统受干扰前所处的平衡位置无关。( )
- 经典控制理论描述系统的数学模型是传递函数。( )
- 线性定常系统齐次状态方程的解也可以称为系统自由运动的解或零输入响应。( )

- 线性系统的状态空间描述经过线性变换后,系统的维数、特征值和传递函数( )。
- 多输入-多输出线性时变系统状态空间表达式的矢量矩阵形式为( )。
- 若输出方程不包含某个状态变量,则该状态变量一定不能观。( )
- 非线性系统状态空间表达式的矢量矩阵形式为( )。
- 约旦标准型判据同样适用于线性定常离散系统。( )
- 原系统传递函数阵的阶数一定高于能控能观子系统传递函数的阶数。( )
- 为加快观测器的收敛速度,观测器的频带应尽可能小( )
- 非线性是系统本身所固有的特性,实际控制系统都是非线性的。线性系统仅仅是实际系统在忽略了非线性因素后的理想模型,线性系统实际上是不存在的。( )
- BIBO稳定的系统是平衡状态渐近稳定。( )
- 单输入单输出系统,状态反馈矩阵后仅改变传递函数的分母多项式,不改变分子多项式。( )
- 设计带状态观测器的状态反馈系统时,必须先设计状态观测器,再设计状态反馈控制器。( )
- 状态空间模型的线性变换不改变状态空间表达式的特征值、传递函数和特征多项式。( )
- 一个内部稳定的系统必定是外部稳定的。( )
- 状态转移矩阵由系统状态方程的系统矩阵决定,进而决定系统的动态特性。( )
- 李雅普诺夫稳定性是关于系统平衡状态的稳定性。( )
- 内部稳定性是指系统状态运动的稳定性,反映的是系统内部状态受干扰的影响。( )
- 相比于输出反馈,状态反馈能提供更丰富的状态信息和可供选择的自由度,因而使系统容易获得更为优异的性能。( )
- 对于离散时间系统,迭代法可以应用于定常系统和时变系统的求解。( )
- 状态转移矩阵包含了对应自治系统的全部信息。( )
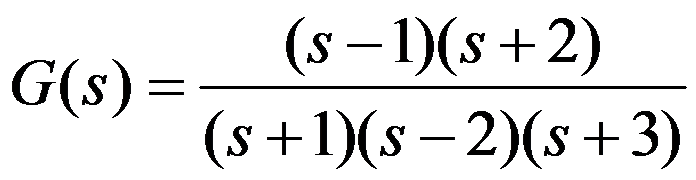
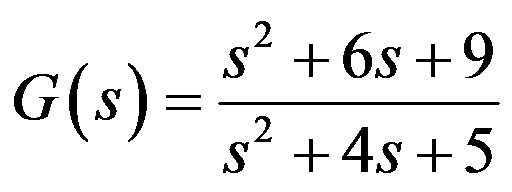
- 若单输入单输出系统传递函数没有零极点对消,则系统( )。
- 对于线性定常系统的结构分解,下列表述正确的有( )。
- 带状态观测器的状态反馈系统和直接状态反馈系统具有相同的传递函数矩阵。( )
- 计算状态空间表达式的解,是从定量分析角度研究系统的运动规律。( )

- 下列语句中,不正确的是( )。
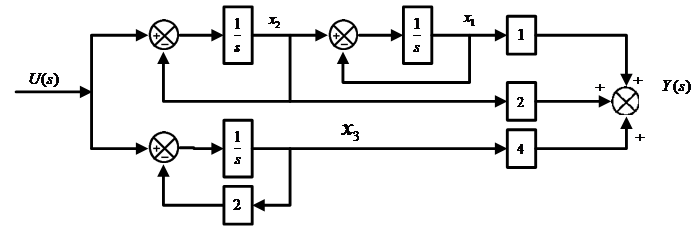
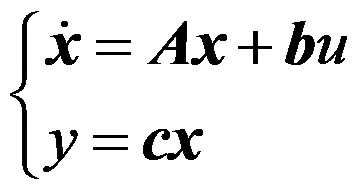
- 单输入-单输出线性时不变系统状态空间表达式的矢量矩阵形式为( )。


- 下列语句中,正确的是( )。
- 单输入单输出系统,状态反馈可进行任意极点配置的充分必要条件是( )。
- 观测器反馈和直接状态反馈完全等效。( )
- 状态反馈改变系统的能控性和能观性。( )
- 状态反馈是一种全状态反馈,输出反馈可看作是一种部分状态反馈。( )
- 引入状态反馈后系统的系统矩阵A和系统维数均发生变化。( )
- 有效的状态观测器系统有( )。

- 李雅普诺夫函数是正定函数。( )
- Lyapunov 第二法给出了判定稳定性的什么条件( )
- BIBO稳定的含义为( )。
- 如果一个系统的李雅普诺夫函数确实不存在,那么就可以判定该系统是不稳定的。( )
- 稳定性问题是相对于某个平衡状态而言的。( )
- 关于系统Lyapunov稳定性说法正确的是( )。
- 若原系统不完全能控,以下( )可将系统按能控性进行结构分解。

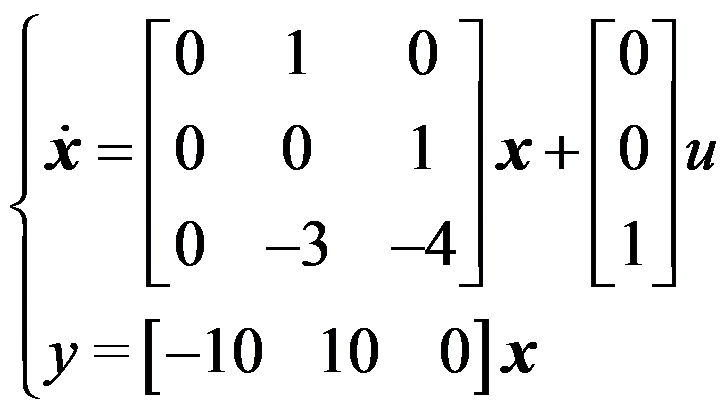
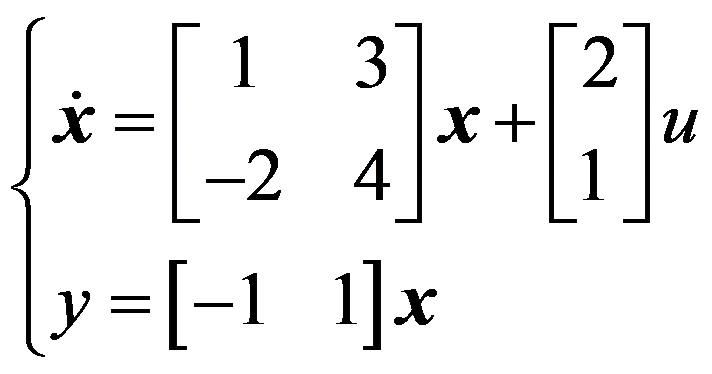
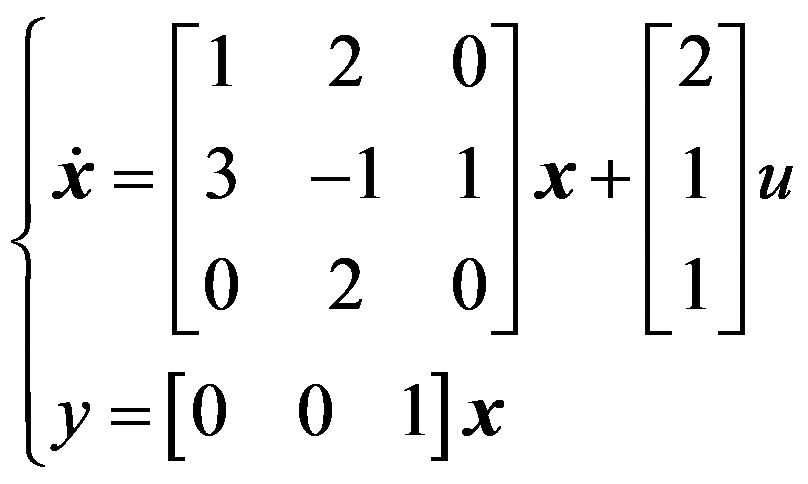
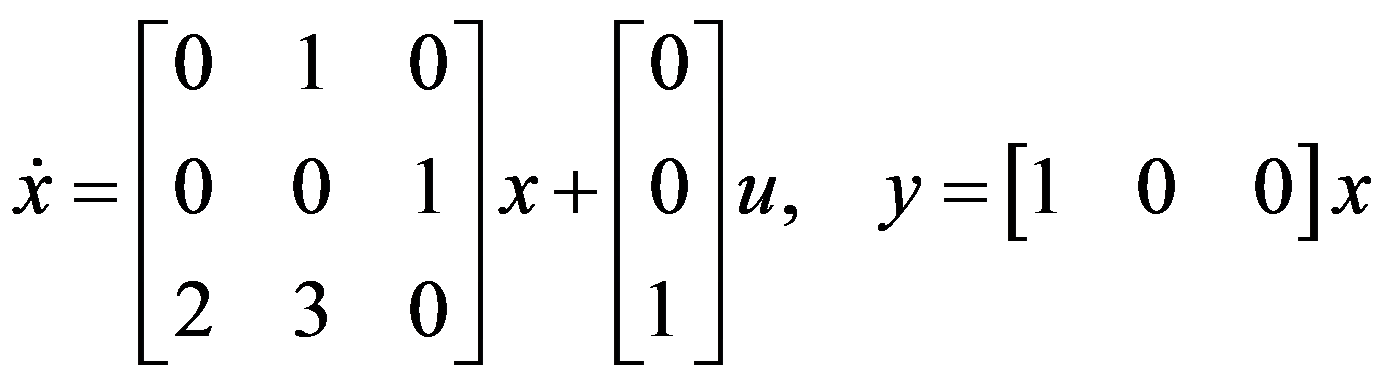
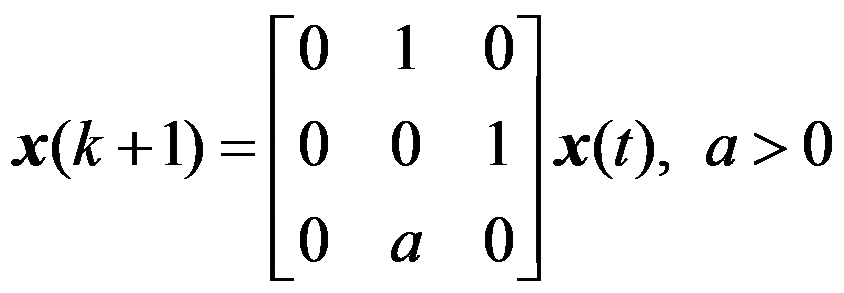
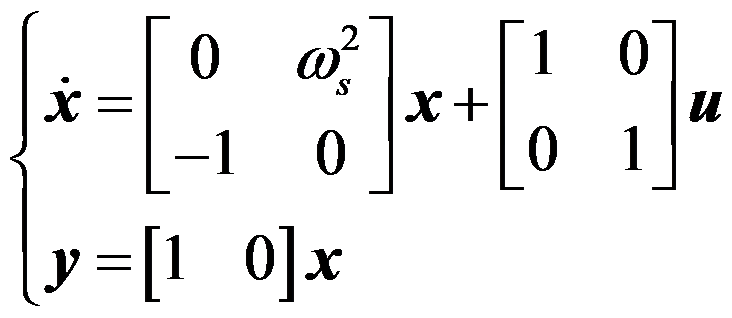
- 下列系统具有能观性的有( )。
- 能控标准型和能观标准型一定都互为对偶系统。( )
- 线性变换不改变系统的能控性和能观性。( )
- 单输入单输出系统,若传递函数存在零极点对消,则对应的状态空间表达式不能控且不能观。( )
- 线性系统的响应包含两部分,一部分是零状态响应,一部分是零输入响应。( )
- 不是线性定常系统状态转移矩阵的性质。( )


- 线性系统的状态转移矩阵是唯一的。( )
- 线性定常系统的数学模型描述是( )。


- 系统状态空间实现中选取状态变量不是唯一的,其状态变量的个数是唯一的( )

- 由一个状态空间模型可以确定多个传递函数。( )
- 通过测量输出量,产生一个与输出信号存在函数关系的信号的元件称为( )。
- 经典控制理论描述系统的数学模型是由高阶线性常微分方程演变来的传递函数,适合分析和设计下列哪种系统( )
- 现代控制理论是建立在状态空间法基础上的一种控制理论,是自动控制理论的一个主要组成部分,比经典控制理论所能处理的控制问题要广泛得多,适合分析和设计下列哪种系统( )
- 闭环控制系统的控制方式为( )。
- 线性系统的状态观测器有两个输入,即原系统的输入u和系统的输出y。( )

- 内部稳定性实质上等同于李雅普诺夫意义下的渐近稳定。( )
- 当系统的传递函数不出现零、极点对消现象时,内部稳定性和外部稳定性等价。( )
- 对于离散时间系统,Z反变换法可以应用于定常系统和时变系统的求解。( )
- 若一线性定常系统的平衡状态是渐近稳定的,则从系统的任意一个状态出发的状态轨迹随着时间的推移都将收敛到该平衡状态。( )
- 对偶系统的特征值相同,传递函数阵互为转置。( )
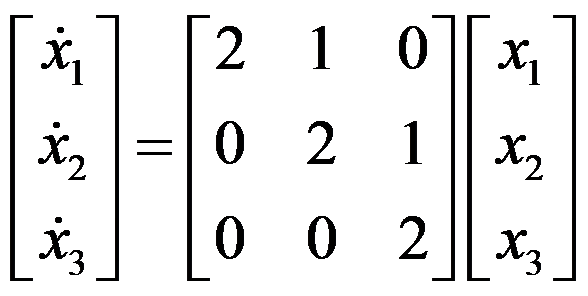
- 线性定常系统,约旦块对应的输入矩阵的第一行元素不全为零,则系统完全能控。( )
- 李雅普诺夫直接法的四个判定定理中所述的条件都是充分条件。( )
- 动态系统的输入输出关系是微分方程。( )
- 现代控制理论的研究范围及分支包含( )。
- 下面关于线性定常连续系统的状态转移矩阵表述正确的是( )。
- 设计状态反馈阵第一步需要验证( )。
- 当状态向量不便或不能直接测量时,可通过( )获取状态估值。
- 多输入-多输出线性时不变系统状态空间表达式的矢量矩阵形式为( )。
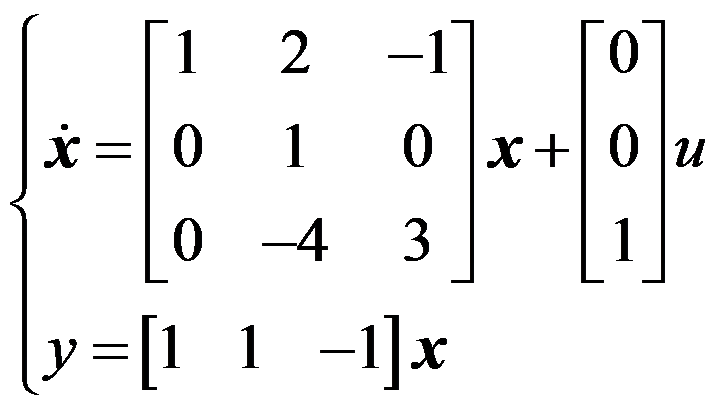
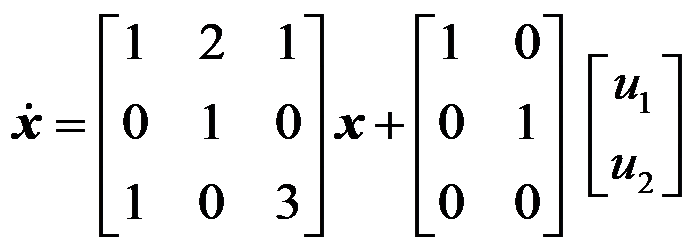
- 下列系统具有能控性的有( )。

- 下面关于线性定常连续系统的Lyapunov方法说法错误的是( )。

答案:错
答案:对
答案:对
答案:对
答案:错
答案:错
答案:对
答案:错
答案:对
答案:错
答案:对
温馨提示支付 ¥5.00 元后可查看付费内容,请先翻页预览!