- LEGO EV3机器人平台,可以通过以下哪种方式与电脑建立通讯连接(多选)( )
- 直齿圆柱齿轮传动,当齿轮直径不变,而减小模数增加齿数时,则( )。
- 使用红外传感器测量距离,其返回值的范围是( ):
- 红外传感器在信标模式下,可以测量信标与传感器之间的( ):
- 多旋翼无人机使用的动力电池一般为( )。
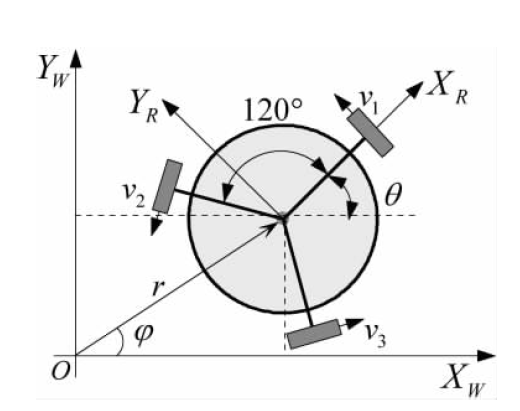
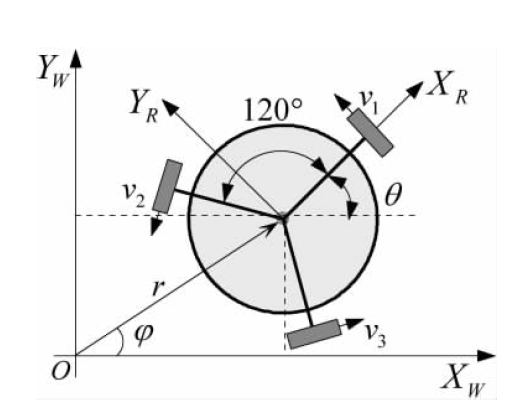
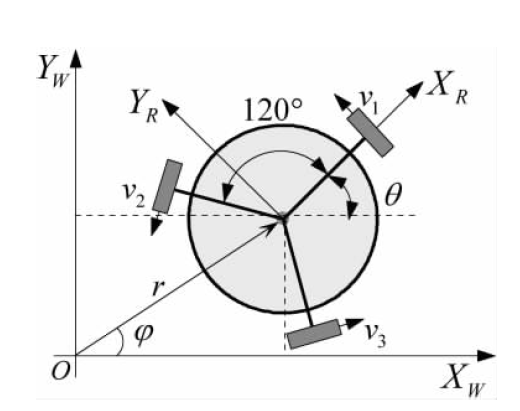
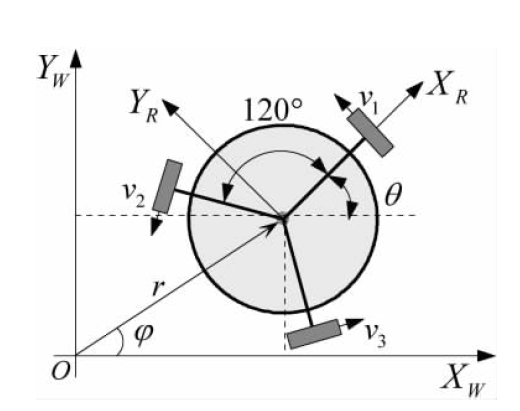
- 本课程中的三轮机器人一共有___个自由度?( )
- 一对受稳定载荷作用并单向运转的齿轮转动,工作时在轮齿根部所受的弯曲应力变化特征可以简化为( )。
- 一般不用来给无人机提供高度信息的传感器是?( )
- 某多旋翼无人机电机转速为3000转,是指 ( )。
- 如果在Python语言环境下,定义一个连接在4口的色彩传感器CS,下面哪种方式是正确的?( )
- 为通过试验得到机器人的带宽,则输入信号应为:( )
- 某多旋翼无人机飞行器动力电池标有22.2V,它是( )?
- 某多旋翼无人机动的电机标有500KV字样,意义是指( )?
- LEGO EV3机器人平台,最多可以安装( )个传感器。
- 多旋翼无人机动力系统主要由动力电机,动力电源和( )组成。
- 状态控制器设计,要求系统是:( )
- 为通过试验得到机器人调节时间,则输入信号应为:( )
- 三因素3水平正交试验设计正交试验设计是指研究多因素多水平的一种试验设计方法,根据正交性从全面试验中挑选出部分有代表性的点进行试验,是一种高效、快速而经济的多因素试验设计方法。PID控制器共有Kp,Ki,Kd三个参数(因素),每个参数设计三个大小不同的数值(水平)。按照正交试验设计方法,则一共需要完成( )组试验。
- 基于机器人想要实现精确到毫米的位置测量,最好是选用哪种传感器测量距离?( )
- 在本课程的机器人控制系统中,如果实现机器人行驶距离的控制,则PID控制器的输入信号为:( )
- 以下哪种动力电池放电电流最大( )?
- 已知点沿其轨迹的运动方程为s=b+ct,其中b和c均为常量,则( )。
- LEGO EV3机器人平台,标识为( )的接口可以连接电脑;

- 渐开线标准齿轮的根切现象发生在( )。
- 具有自锁性能的机构,在任何情况下都是不能运动的( )。
- 在一般情况下,机构具有确定运动的条件是原动件数目等于( )
- 机器人如果不能满足快速要求,以下哪种方法不可以提升其快速性?( )
- 多旋翼无人机在有GPS信号的情况下悬停,突然GPS信号丢失,无人机将( )
- 在下列四种类型的联轴器中,能补偿两轴的相对位移以及可以缓和冲击、吸收振动的是( )。
- 在移动副中,若驱动力作用在( ),将发生自锁。
- 如果在Python语言环境下,定义一个连接在B口的电机变量MB,下面哪种方式是正确的?( )
- 相对于传统直升机,多旋翼无人机最大的优势是( )?
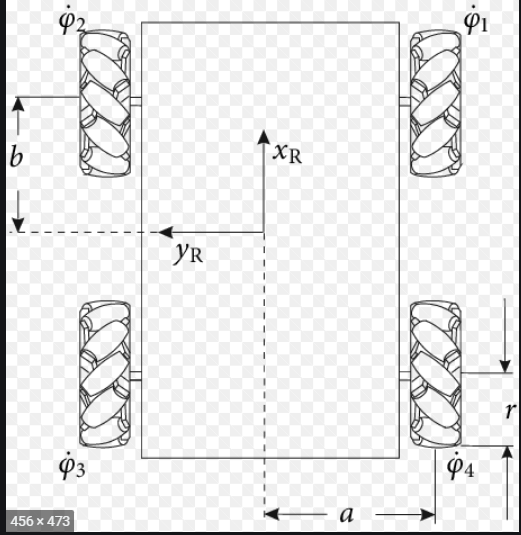
- 图示四轮机器人,在其自身坐标系下,YR方向上的速度,Vyr=( )?
- 多旋翼无人机使用的锂聚合物动力电池,其单体标称电压为( )?
- 无刷电机如果遇到旋转方向相反,需要换向时应如何处理?( )
- 以下哪个是小型多旋翼无人机常用的动力电池类型( )?
- LEGO EV3机器人平台,可以哪种方式与不能够与电脑建立通讯连接;( )
- 在Python环境下编写LEGO EV3的控制程序,还需要安装( );


- 在曲柄摇杆机构中,为提高机构的传力性能,应该( )。
- 空间的球铰有( )个自由度。
- 如果电机要求其频带宽度1Hz,为实现基于状态反馈控制,则状态观测器的截止频率最好在( )
- 本课程中,设计直流电机的状态反馈控制器,实现其输出角度控制,则直流电机的状态变量为一个二维向量,包括( ):
- 若机器人不能感知其自身姿态,是否能够实现在地面上的直线运动:( )
- 状态状态观测器设计,要求系统是:( )
- 状态观测器设计,要求系统是:( )
- PID控制器中,与机器人快速性密切相关的参数为:( )
- 在计算机系统重实现PID控制器,采样周期T应设定为:( )

- 常用的PID控制器中,如果系统动态性能不能满足要求,则首先应考虑调整其:( )
- 常用的PID控制器中,如果系统存在稳态误差,则首先应考虑调整其:( )
- 控制系统的性能评价,主要包括以下几个方面的内容( )。
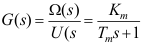
- 基于机器人运动特性,得到机器人在自身坐标系下的运动特性的过程,称为( )过程。
- 在Python环境中,定义一个电机变量MotorA, 如果用MotorA.run(V)控制电机运行,则V的最大有效值为:( )

- LEGO机器人平台中使用的色彩传感器,一共可以区分____种色彩:( )A .3
- 下图中哪个是超声波传感器?( )
- 超声波传感器使用函数SonicSensor.distance(),返回值的单位为:( )A .m
- LEGO机器人平台中使用的色彩传感器,不能分别出来的色彩为:( )A .黑
- LEGO机器人平台中使用的陀螺仪,测量分辨率为:( )
- 一个四轮全向机器人,其驱动麦克纳姆轮布局如图所示,如果机器人想实现向绕中心顺时针旋转,则四个驱动麦克纳姆轮运动方式为:( )
- 如果在Python环境中定义一个输入为机器人的运动特性Vx,Vy,Wr,输出为电机转动角速度w1,w2,w3的函数Kinematics,则正确的方式为:( )
- 如果在Python语言环境下,定义一个连接在3口的陀螺仪GS,下面哪种方式是正确的?( )
- 如果在Python语言环境下,定义一个连接在2口的超声传感器US,下面哪种方式是正确的?( )
- 如果在Python语言环境下,定义一个连接在1口的红外传感器IR,下面哪种方式是正确的?( )
- 如果设计一个四轮全向机器人,需要使用下面哪种形式的车轮?( )
- 功能分析系统技术(FAST图)中,从右向左描述的是系统的哪种运行逻辑?( )
- LEGO EV3机器人平台,标识为( )的接口可以连接电机
- LEGO EV3机器人平台,最多可以安装( )个传感器
- LEGO EV3机器人平台,标识为( )的接口可以安装传感器
- LEGO EV3机器人平台,最多可以安装( )个驱动电机
- 智能机器人通常要具有三个要素特征,分别是( )。
答案:蓝牙###wifi###usb
答案:降低了轮齿的弯曲强度
答案:-100~100###0~100
答案:相对角度###相对距离
答案:聚合物锂电池
答案:
答案:3
答案:脉动循环变应力
答案:光流传感器、摄像头
答案:每秒钟3000转
答案:CS=ColorSensor(Port.S4);
温馨提示支付 ¥3.00 元后可查看付费内容,请先翻页预览!