第八章单元测试
- 虚位移是假想的、极微小的位移,它与时间、主动力以及运动的初始条件无关。 ( )
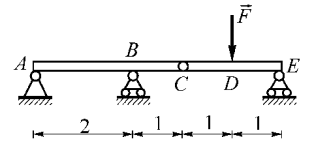
- 为了用虚位原理求解系统B处约束力,则需将B支座解除,代以适当的约束力,其时B点的虚位移与D点的虚位移大小之比drB:drD=( )。
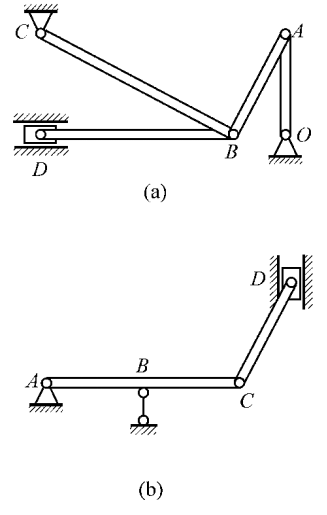
- 试确定图示系统的自由度数k。图(a)图(b)的k分别为( )。
- 机构在图示瞬时有
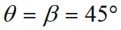 ,若A点的虚位移为drA,则B点的虚位移的大小drB 以及OC杆中点D的虚位移的大小drC 分别为( )。
,若A点的虚位移为drA,则B点的虚位移的大小drB 以及OC杆中点D的虚位移的大小drC 分别为( )。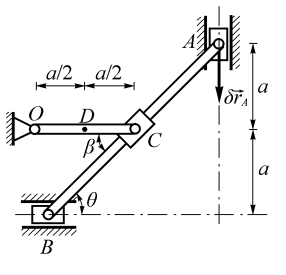
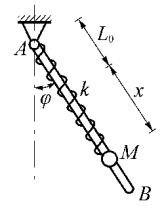
- 均质细杆AB长L,重P,可在铅垂面内绕A转动,小球M重P1,可在AB杆上滑动,弹簧原长L0,刚性系数k,不计弹簧重量和所有各处摩擦。今取j、x为广义坐标,则对应于广义坐标x的广义力Q=( )。
A:错 B:对
答案:错
A:4:3。 B:2:1; C:1:1; D:1:2;
A:2,1 B:1,0 C:1,3 D:0,1
A:drA,0; B:2drA,0; C:0.5drA,2drA.。 D:drA ,2drA;
A:P1cosj+k(L0+x); B:P1cosj+kx。 C:P1cosj-k(L0+x); D:P1cosj-kx;
温馨提示支付 ¥3.00 元后可查看付费内容,请先翻页预览!

