广东工业大学
- 线性系统稳定的充要条件是所有闭环特征方程的根的实部均为正,即都分布在S平面的右平面。( )
- https://image.zhihuishu.com/zhs/doctrans/docx2html/202107/9b6dc064fda5496d92105b089759c923.png
- 闭环带宽wb越大,闭环系统的快速性越好,但抗干扰能力下降。( )
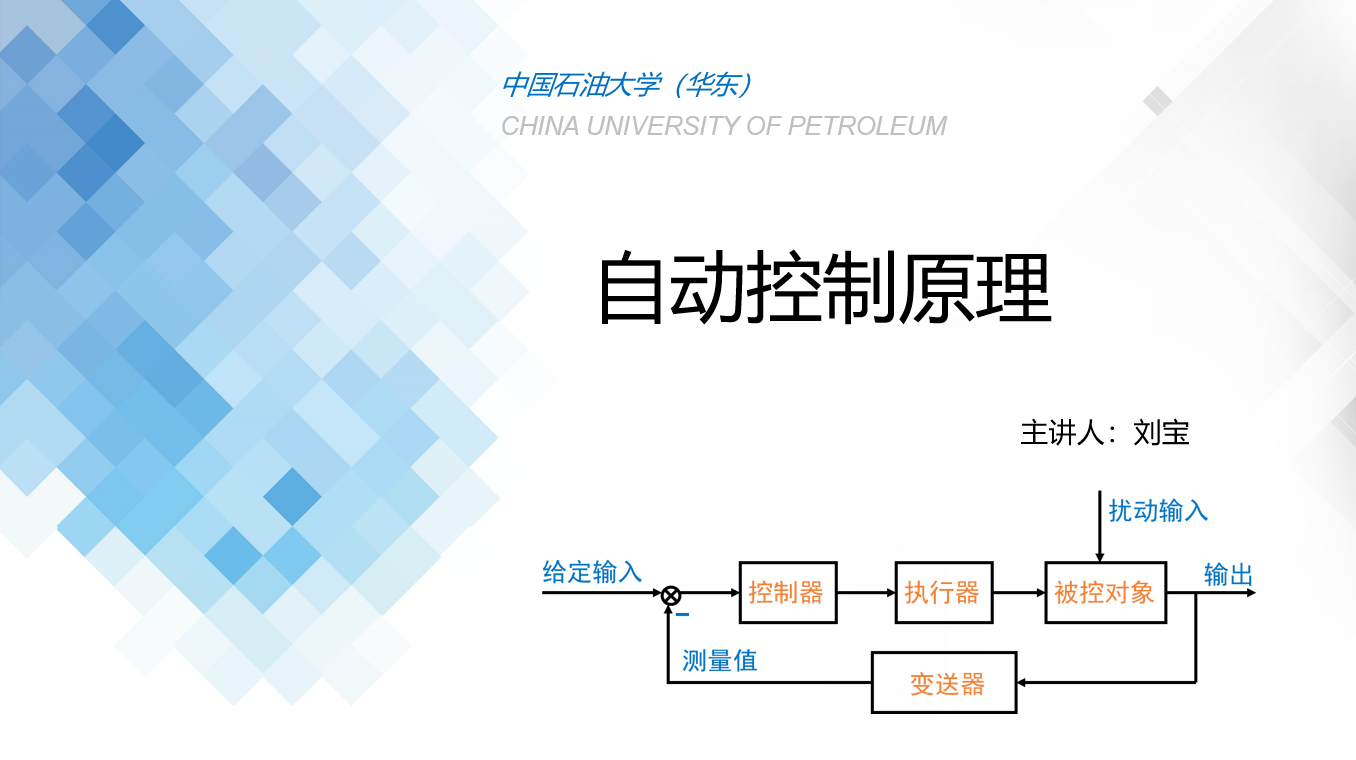
- 闭环控制系统又称为反馈控制系统。( )
- 应用劳斯判据判断系统稳定性,劳斯表中第一列数据全部为负数,则系统稳定。( )
- 系统稳态误差分为给定稳态误差和扰动稳态误差两种。( )
- 对于有稳态误差的系统,在前向通道中串联比例微分环节,系统误差将变为零。( )
- 采用计算机实现连续控制器,需考虑将计算机运算出来的离散控制量恢复为连续信号,这可通过一阶保持器来实现。( )
- https://image.zhihuishu.com/zhs/doctrans/docx2html/202107/6ee245058ef847ad8624d1add36fdc5e.png
- 离散时间控制系统中,控制器的输入端是( )转换器,控制器的输出端是( )转换器( )
- https://image.zhihuishu.com/zhs/doctrans/docx2html/202107/4b741f6f9ab34a2e9e173b2a95bf96ed.png
- 分析系统的频率特性时常用的典型输入信号时( )
- 时域中常用的数学模型不包括( )
- 方框图的转换,所遵循的原则为( )
- 相位超前校正装置的奈氏曲线为( )
- 下列传递函数,能在
 处提供最大相位超前角的是( )
处提供最大相位超前角的是( ) - 某校正环节传递函数
 ,则其频率特性的奈氏图终点坐标为( )
,则其频率特性的奈氏图终点坐标为( ) - 在用实验法求取系统的幅频特性时,一般是通过改变输入信号的()来求得输出信号的幅值( )
- 方框图化简时,并联连接方框总的输出量为各方框输出量的( )
- 已知在连续时间系统中
 ,当输入是连续信号时,离散化的
,当输入是连续信号时,离散化的 ( )
( ) - 零阶保持器ZOH的传递函数
 为( )
为( ) - 进行串联超前校正前的穿越频率
 与校正后的穿越频率
与校正后的穿越频率 的关系,通常是( )
的关系,通常是( ) - 对连续被控对象频率特性,最接近它的离散开环频率特性的表示方式为( )
- 若某最小相位系统的相角裕度
 ,则下列说法正确的是 ( )
,则下列说法正确的是 ( ) - 开环对数频率特性低频段决定系统的( )
- https://image.zhihuishu.com/zhs/doctrans/docx2html/202107/5c66fdf5301f461b85c4815905a70855.png
- 单位反馈系统开环传递函数为
 ,当输入为单位阶跃时,则其位置误差为( )。
,当输入为单位阶跃时,则其位置误差为( )。 - 已知
 ,则
,则 ( )。
( )。 - 适合使用传递函数描述的系统是( )
- https://image.zhihuishu.com/zhs/doctrans/docx2html/202107/baae0c46277a4fa9bf9397e534b48a2c.png
- 开环传递函数为
 ,则实轴上的根轨迹为( )
,则实轴上的根轨迹为( ) - 决定系统传递函数的是系统的( )
- 当忽略电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输入变量时,电动机可看作一个( )。
- 设控制系统的开环频率特性为
 ,则其对数幅频渐近特性低频段(
,则其对数幅频渐近特性低频段( )的
)的 为( )
为( ) - 惯性环节和积分环节的频率特性在( )上相等。
- https://image.zhihuishu.com/zhs/doctrans/docx2html/202107/d606865d12ed468c99338cfb3e78d7e2.png
- 下面属于现代控制理论的是( )。
- 最小相位系统稳定的充要条件是奈奎斯特曲线( )
 点
点 - 某单位比例反馈控制系统的被控对象
 ,若使得相位裕量
,若使得相位裕量 ,
, 的值应为( )
的值应为( ) - 某单位反馈系统的开环传递函数为:
 ,当k=( )时,闭环系统临界稳定。
,当k=( )时,闭环系统临界稳定。 - https://image.zhihuishu.com/zhs/doctrans/docx2html/202107/8052764b75fa435d99c66abb525b60d2.png
- 在对控制系统稳态精度无明确要求时,为提高系统的稳定性,最方便的是( )
- 若已知某串联校正装置的传递函数为
 ,则它是一种( )。
,则它是一种( )。 - 最小相位系统的开环增益越大,其( )。
- 已知被控对象
 ,
, 为增益系数,采样时间为
为增益系数,采样时间为 ,则离散化被控对象
,则离散化被控对象 ( )。
( )。 - 通过测量输出量,产生一个与输出信号存在确定函数比例关系值的元件称为( )。
- 下列哪个开环系统对应的闭环系统不稳定( )。
- 香农(Shannon)采样定理表明,如果信号
 是有限频宽,最高频率为
是有限频宽,最高频率为 ,采样频率
,采样频率 满足( ),采样信号
满足( ),采样信号 可以完全恢复到
可以完全恢复到 - 在直流电动机调速系统中,霍尔传感器是用作( )反馈的传感器。
A:对 B:错
答案:错
A:错 B:对
答案:
A:对 B:错
答案:对
A:错 B:对
答案:对
A:对 B:错
答案:错
A:错 B:对
答案:对
A:对 B:错
答案:错
A:错 B:对
答案:对
A:
B:
C:
D:
答案:
A:A/D和A/D
B:D/A和A/D
C:A/D和D/A
D:D/A和D/A
A:相位超前校正
B:相位滞后—超前校正
C:相位滞后校正
D:反馈校正
A:单位阶跃函数
B:单位脉冲函数
C:正弦函数
D:单位速度函数
A:差分方程
B:传递函数
C:状态方程
D:微分方程
A:结构不变
B:环节个数不变
C:每个环节的输入输出变量不变
D:等效
A:下半圆
B:上半圆
C:45°弧线
D:圆
A:
B:
C:
D:
A:(1,j1)
B:(1,j0)
C:(0,j0)
D:(10,j0)
A:相位
B:稳定裕量
C:时间常数
D:频率
A:加权平均
B:平均值
C:乘积
D:代数和
A:
B:
C:
D:
A:
B:
C:
D:
A:
>B:
与无关C:
=D:
<A:
 (
( )
)B:
C:
A:稳定
B:只有当幅值裕度
 时才稳定
时才稳定C:不稳定
D:不能判用相角裕度判断系统的稳定性
A:稳态误差
B:抗干扰能力
C:动态性能
D:型别
A:

B:
C:
D:
A:2
B:0.2
C:0.05
D:0.5
A:

B:

C:

D:

A:单输入,单输出的线性时变系统
B:非线性系统
C:单输入,单输出的线性定常系统
D:单输入,单输出的定常系统
A:(-4,0)
B:(-∞,-4)
C:( 0,∞)
D:(-4,∞)
A:(-3,∞)
B:(-∞,-3)
C:(-3,0)
D:(0,∞)
A:结构和参数
B:输入信号
C:结构
D:参数
A:积分环节
B:惯性环节
C:微分环节
D:比例环节
A:
B:
C:
D:
A:最小幅值
B:幅频特性的斜率
C:穿越频率
D:相位变化率
A:惯性环节
B:微分环节
C:比例环节
D:积分环节
A:频域分析
B:时域分析
C:PID控制
D:最优控制理论
A:顺时针包围
B:不包围
C:逆时针包围
D:包围
A:

B:
C:
D:
A:40
B:20
C:10
D:30
A:
B:
C:
D:
A:滞后校正
B:减小增益
C:超前校正
D:滞后-超前
A:相位滞后—超前校正
B:相位超前校正
C:相位滞后校正
D:反馈校正
A:稳态误差越小
B:稳定裕量越大
C:振荡次数越多
D:相位变化越小
A:
B:
C:
D:
A:放大元件
B:比较元件
C:反馈元件
D:给定元件
A:
B:
C:
D:
A:
B:
C:
D:
A:电压
B:电流
C:位移
D:速度
温馨提示支付 ¥5.00 元后可查看付费内容,请先翻页预览!