1.二阶欠阻尼系统的上升时间tr定义为( )。
A:单位阶跃响应达到其稳态值的50%所需的时间
B:单位阶跃响应从零第一次上升到稳态值时所需的时间
C:单位阶跃响应从稳态值的10%上升到90%所需的时间
D:单位阶跃响应达到稳态值所需的时间
答案:单位阶跃响应从零第一次上升到稳态值时所需的时间
2.已知单位反馈控制系统在阶跃函数作用下,稳态误差ess为常数,则此系统为( )。
A:3型系统
B:1型系统
C:2型系统
D:0型系统
答案:0型系统
3.反映控制系统稳态性能的指标为( )。
A:p%
B:tr
C:ts
D:ess
答案:ess
4.所谓校正(又称补偿)是指( )。
A:使系统稳定
B:加入PID校正器
C:在系统中增加新的环节或改变某些参数
D:使用劳斯判据
答案:在系统中增加新的环节或改变某些参数
5.滞后——超前校正装置的相角是,随着的增大( )。
A:先滞后再超前
B:先超前再滞后
C:不超前也不滞后
D:同时超前滞后
答案:先滞后再超前
6.为了增加系统的稳定性裕量,可以( )。
A:减小输入信号
B:使用开环系统
C:增大系统的增益
D:减小系统的增益
答案:减小系统的增益
7.利用开环奈奎斯特图可以分析闭环控制系统的( )。
A:稳定性
B:动态性能
C:稳态性能
D:精确性
答案:稳定性
8.在奈氏判据中,若F(s)在F(s)平面上的轨迹顺时针包围原点两次,则N的值为( )。
A:2
B:-1
C:1
D:-2
答案:-2
9.若一系统的特征方程式为(s+1)2(s-2)2+3=0,则此系统是( )。
A:临界稳定的
B:条件稳定的
C:稳定的
D:不稳定的
答案:稳定的
10.对于典型二阶系统,阻尼比ζ愈小,则( )。
A:峰值时间tp越大
B:相对稳定性越差
C:振荡次数越小
D:最大超调量越小
答案:相对稳定性越差
11..采用无源滞后校正对系统抗噪声干扰能力的影响是( )。
A:能力不定
B:能力上升
C:能力下降
D:能力不变
A:加权平均 B:乘积 C:代数和 D:平均值 13.加大中频宽,将使2型系统( )。
A:稳定性变差 B:对稳定性能无影响 C:最大超调量增大 D:相位稳定裕量增大 14.时域分析中最常用的典型输入信号是( )。
A:脉冲函数 B:阶跃函数 C:正弦函数 D:斜坡函数 15.控制系统的最大超调量σp反映了系统的( )。
A:相对稳定性 B:稳态性能 C:绝对稳定性 D:快速性 16.系统的正弦响应是指( )。
A:不论输入为何种信号,输出都为正弦时的情况 B:对系统输入一系列不同频率正弦信号时,输出的响应变化情况 C:对系统输入一系列幅值不同的正弦信号时,输出的响应变化情况 D:对系统输入一个固定的频率正弦信号时,输出的响应变化情况 17.若劳斯阵列表中第一列的系数为(3,-2,1,-2,4)T,则在根平面的右半部分的特征根有( )。
A:1个 B:3个 C:2个 D:4个 18.利用乃奎斯特稳定性判据判断系统的稳定性时,Z=P-N中的Z表示意义为( )。
A:闭环特征方程的根在S右半平面的个数 B:闭环传递函数零点在S右半平面的个数 C:开环传递函数零点在S右半平面的个数 D:开环传递函数零点在S左半平面的个数 19.由系统外部因素(如电网波动、环境温度变化等)使系统输出量发生变化的物理量叫做( )。
A:输入量 B:反馈量 C:输出量 D:扰动量 20.一般讲,如果开环系统增加积分环节,则其闭环系统的相对稳定性将( )。
A:变好 B:不变 C:不定 D:变坏 21.自动控制系统中,比较元件又称为( )
A:偏差检测器 B:控制器 C:放大器 D:受控对象 22.线性定常系统的脉冲传递函数,是在零初始条件下( )。
A:系统输出信号的z变换与输入信号的z变换之比 B:系统输出信号与输入信号之比 C:系统输入信号与输出信号之比 D:系统输入信号的z变换与输出信号的z变换之比 23.单位脉冲输入函数的数学表达式是r(t)=( )。
A:δ(t) B:Δ(t) C:1(t) D:1 24.系统的稳态误差,除了比例增益外,主要取决于系统中的( )。
A:振荡环节 B:比例微分环节 C:积分环节多少 D:惯性环节 25.典型二阶系统在阻尼比=l时称为( )。
A:欠阻尼系统 B:过阻尼系统 C:无阻尼系统 D:临界阻尼系统 26.研究随动系统时,常用的典型输入信号是( )。
A:脉冲函数 B:阶跃函数 C:斜坡函数 D:正弦函数 27.当二阶系统的根为一对相等的负实数时,系统的阻尼比ζ为( )。
A:0 < ζ < 1 B:ζ = 1 C:ζ = - 1 D:ζ= 0 28.若f(t)的拉氏变换为F(s) ,则eat·f(t)的拉氏变换为( )。
A:F(s+a) B:eas· F(s) C:eas F(s) D:F(sa) 29.当二阶系统的阻尼比ζ > 1时,特征根为( )。
A:两个不等的正实数 B:两个相等的负实数 C:两个不等的负实数 D:两个相等的正实数 30.系统特征方程为
 ,则系统( )。
,则系统( )。A:稳定; B:临界稳定 C:型别N=1。 D:右半平面闭环极点数; 31.
 的拉氏变换式是( )。
的拉氏变换式是( )。A: B: C: D: 32.稳态速度误差系数Kv=( )。
A: B: C: D: 33.单位斜坡信号f(t) = t的拉氏变换式是( )。
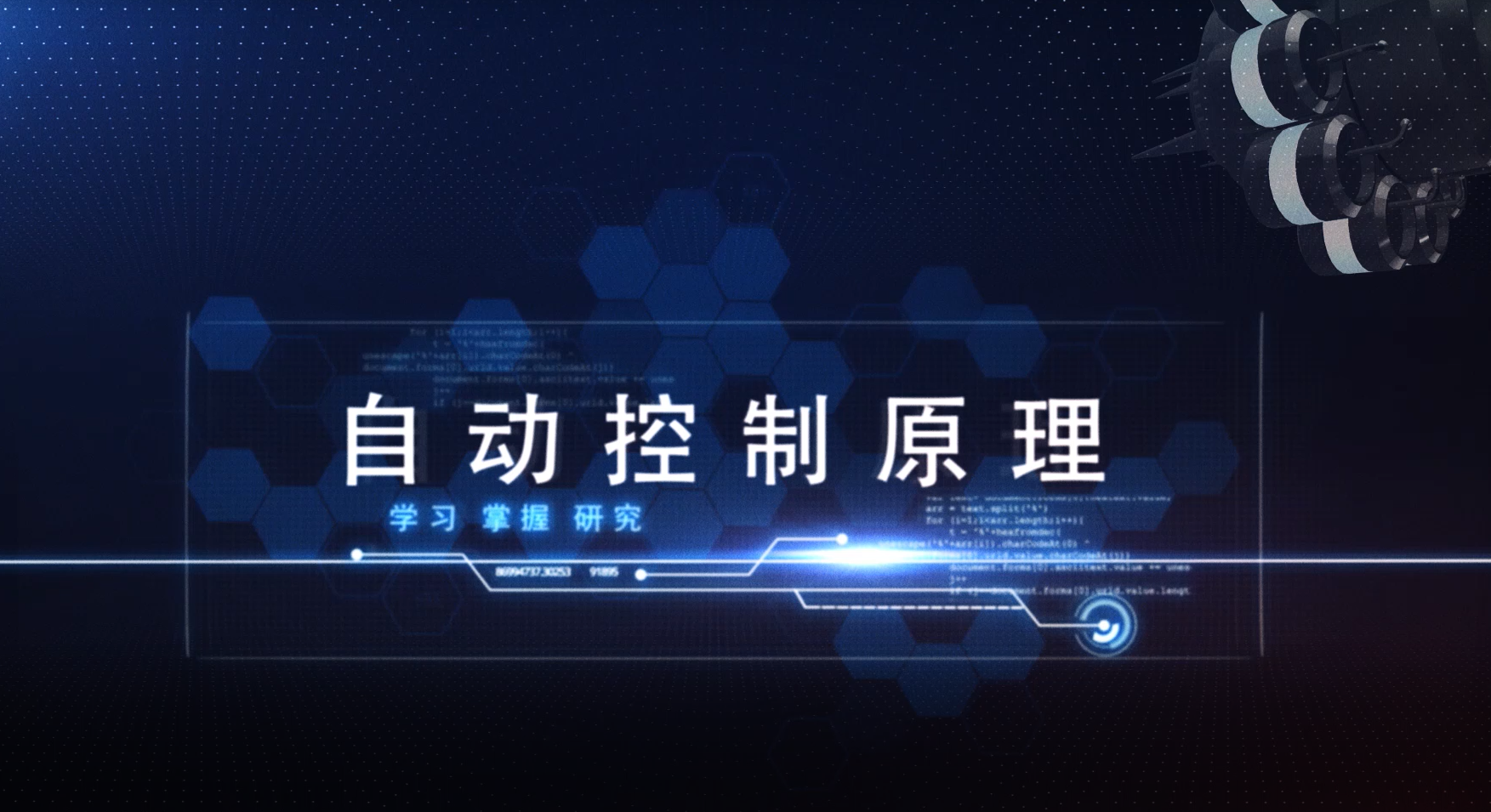
A: B: C: D: 34.某最小相位系统的开环传递函数为G(s)=
 ,此系统为( )。
,此系统为( )。A:处于稳定边界的系统 B:稳定性尚无法确定的系统 C:不稳定系统 D:稳定系统 35.二阶系统的传递函数为
 ,则系统增益为( )。
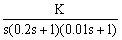
,则系统增益为( )。A:5 B:0.5 C:4 D:10 36.设系统的G(s)=
 ,则系统的阻尼比ζ为( )。
,则系统的阻尼比ζ为( )。A:1 B: C: D: 37.设二阶系统的
 ,则系统的阻尼比ζ和自然振荡频率n为( )。
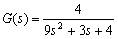
,则系统的阻尼比ζ和自然振荡频率n为( )。A: B: C: D: 38.设二阶振荡环节的频率特性为
 ,则其极坐标图与负虚轴交点频率值 =( )。
,则其极坐标图与负虚轴交点频率值 =( )。A:16 B:8 C:2 D:4 39.设单位负反馈系统的开环传函为G(s)=
 ,那么它的相位裕量g的值为( )。
,那么它的相位裕量g的值为( )。A:15º B:30º C:45º D:60º 40.对于单位加速度输入信号
 ,若系统响应的稳态误差ess = 0,则此系统为( )阶无静差系统。
,若系统响应的稳态误差ess = 0,则此系统为( )阶无静差系统。A:1 B:2 C:零 D:3 41.已知系统的传递函数G(s)=
 ,此系统为( )。
,此系统为( )。A:3型系统 B:1型系统 C:2型系统 D:0型系统 42.若某系统的传递函数为G(s)=
 ,则相应的频率特性G(jω)为( )。
,则相应的频率特性G(jω)为( )。A: B: C: D: 43.惯性环节的传递函数G(s)等于( )。
A: B: C: D: 44.一单位反馈系统的开环Bode图已知,其幅频特性在低频段是一条斜率为-20dB/dec 的渐近直线,且延长线与0dB线的交点频率为wc =5,则当输入为
 时,其稳态误差为( )。
时,其稳态误差为( )。A:0 B:0.1 C:0.5 D:0.2