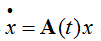
- 关于系统能控性、能观测性叙述正确的是()。
- 关于最小实现的说法正确的是( ) 。

- 下述关于无线时间状态调节问题的说法错误的是:( )。
- 下面说法正确的是()。
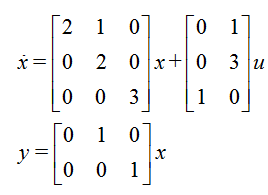
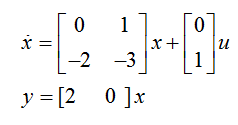
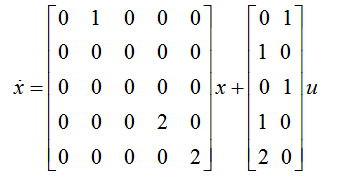
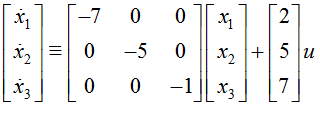
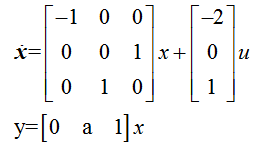
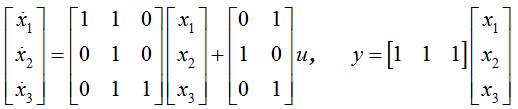
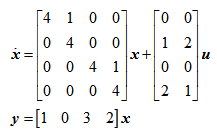
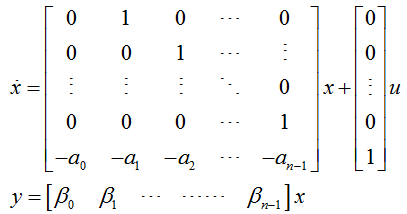
- 下面状态空间描述是能控规范形的是()。
- 若矩阵A的特征多项式等于其最小多项式,则方阵A为循环矩阵。
- 连续时间线性定常系统是BIBO稳定的,就一定是渐近稳定的。
- 输出反馈不改变系统的能控性和能观测性。


- 克拉索夫斯基定理是判断系统平衡状态渐近稳定的充分条件。
- 若被控系统既能控又能观测,则利用状态观测器的状态估计值实现状态反馈控制系统时,状态反馈矩阵的设计和观测器中输出反馈矩阵的设计可以独立进行。

- 根据对偶原理,一个系统的状态能观测性可用其对偶系统的状态能控性来判断。
- 从物理直观性看,能观测性研究系统内部状态“是否可由输出反映的问题”。

- 下述关于渐近稳定性的说法正确的是( )。
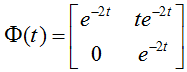
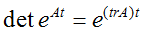
- 下面关于矩阵指数函数说法正确的是()。
- 线性定常系统既可控又可观,系统是BIBO稳定的等价描述( )。

- 下述关于线性系统外部稳定性和内部稳定性的关系,说法正确的是( )。
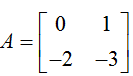
- 给定方常阵A,若其特征值两两相异,则有( )。

- 连续时间线性时不变系统的能控性和能观测性在线性非奇异变换下发生变化。
- 若A矩阵的n个特征值两两互异,则A为循环矩阵。
- 连续时间线性定常系统是渐近稳定的,就一定是BIBO稳定的。
- 若系统的所有状态变量都可由输出反映,则称系统完全能观测。
- 以使一个多输入多输出系统化为多个单输入单输出系统作为性能指标,相应的综合问题称为解耦问题。
- 一个系统的状态能控性可用其对偶系统的状态能观性来判断。
- 当线性定常系统的不能控部分渐近稳定时,系统是状态反馈可镇定的。
- 对于线性时不变系统,系统完全能观测必意味着一致完全能观测。
- 当状态空间描述中的A矩阵有两两互异特征值时,一定可以将其化成对角规范形。
- 零输入响应随时间演化过程,几何上即为状态空间中由初始状态点出发和由各个时刻变换点构成的一条轨迹。
- 用不大的控制能量,使系统输出尽可能保持在零值附近,这类问题称为输出跟踪问题。
- 线性时不变系统的每一平衡状态是李亚普诺夫意义下稳定的充分必要条件为,A的所有特征值均具有非正(负或零)实部,且实部为零的特征值只能是A的最小多项式的单根。
- 李亚普诺夫关于稳定性的研究均是针对平衡状态而言的。
- 系统按能观测性的结构分解对偶于系统按能控性的结构分解。
- 李亚普诺夫意义下稳定只能保证系统受扰运动相对于平衡状态的有界性,不能保证系统受扰运动相对于平衡状态的渐近性。
- 内部稳定性是指自治系统状态自由运动的稳定性,也即李亚普诺夫意义下的渐近稳定,它是由系统的结构和参数决定的。
- 下列关于线性定常系统及其对偶系统说法正确的是()。

- 下述说法错误的是:( )。
- 从物理直观性看,能观测性研究系统内部状态“是否可由输入影响的问题”。
- 单输入系统的能控性指数等于系统状态的维数。
- 状态方程是描述系统状态变量与输入变量之间关系的一阶微分方程组或一阶差分方程组。



- 非奇异线性变换不改变系统的能控性指数和能观测性指数。
- 一个传递函数矩阵描述的最小实现唯一。
- 用不大的控制能量,使系统输出跟踪期望输出的变化,称之为输出跟踪问题。
- 输出方程是描述系统输出变量与状态变量和输入变量之间函数关系的代数方程组。
- 设以(A,B,C)为系数矩阵的状态空间描述是某传递函数矩阵的一个n维实现,则其为最小实现的充要条件是(A,B,C)所描述的系统完全能控。
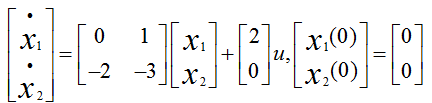
- 关于状态调节问题,下述说法正确的是:( )


- 下面说法正确的是(ABD)。
- 若两个状态空间描述是代数等价的,则以下说法正确的是()。
- 关于有限时间状态调节问题,下述说法正确的是:( )。



- 对偶系统的状态转移矩阵等于原系统状态转移矩阵的逆的转置。
- 坐标变换是一种线性非奇异变换。
- 串联组合系统的传递函数矩阵为各并联子系统的传递函数矩阵之和。

- 线性时不变系统的唯一平衡状态x=0是渐近稳定的充分必要条件是A的所有特征值均具有负实部。

- 同一传递函数矩阵的最小实现代数等价。
- 系统初始响应可看作是零输入响应和零初态响应的叠加。
- 输入输出描述仅描述系统的外部特性,不能反映系统的内部结构特征。
- 李亚普诺夫意义下的稳定实质上是工程意义下的稳定。
- 系统运动的稳定性实质上归结为系统平衡状态的稳定性,也即偏离平衡状态的受扰运动能否依靠系统内部的结构因素而返回到平衡状态或者限制在它的一个有限邻域内。
- 尽管能控性和能达性在定义上存在微小差别,能控性规定为零状态转移到非零状态,能达性规定为由非零状态转移到零状态,但两者是等价的。
- 连续时间线性定常系统的内部稳定性和外部稳定性是等价的。
- 引入状态反馈后,系统的特征值不会改变。
- 系统矩阵A所有特征值均具有负实部是线性时不变系统渐近稳定的充要条件。
- 由系统结构的规范分解所揭示,传递函数矩阵一般而言只是对系统结构的不完全描述,只能反映系统中的能控能观测部分。
- 线性时不变系统的每一平衡状态是李亚普诺夫意义下稳定的充分条件为,A的所有特征值均具有非正(负或零)实部,且实部为零的特征值只能是A的最小多项式的单根。
- 连续时间线性定常系统是渐近稳定的,却不一定是BIBO稳定的。
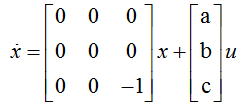
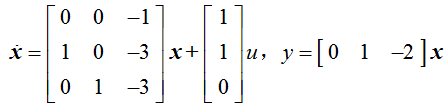
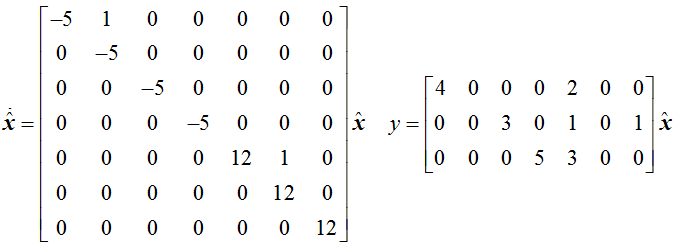
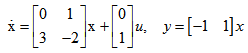
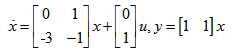
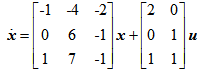
- 判断下述系统哪些可以通过状态反馈实现镇定 ( )。
- 解耦控制就是指对多输入多输出系统,通过一定的控制算法,使系统的每个输入都可单独地影响系统的每个输出。
- 在最优控制问题中,如果系统的性能指标是状态变量和控制变量的二次型函数,则称为线性二次型最优控制问题,简称LQ(Linear Quadratic)问题。
- 状态反馈是一种完全的系统信息反馈,输出反馈则是系统结构信息的一种不完全反馈。
- 以一组期望的闭环系统特征值作为性能指标,综合目标是使所导出的闭环控制系统的特征值配置到期望位置,相应的综合问题称为极点配置问题。
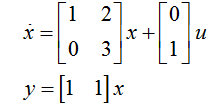
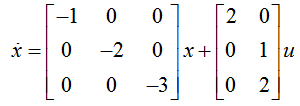
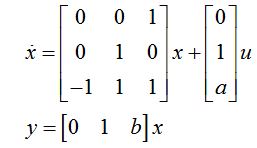
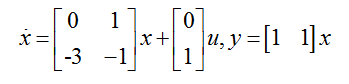
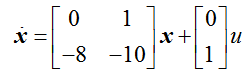
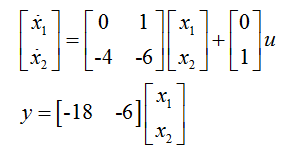
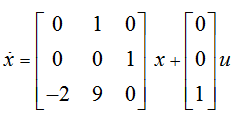
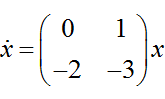
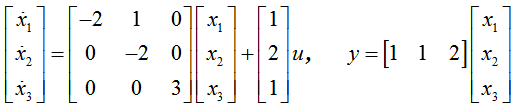
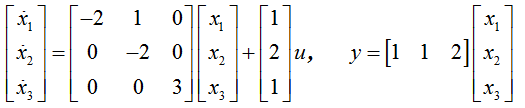
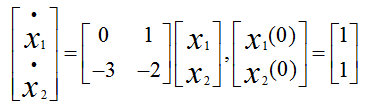
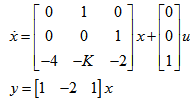
- 通过状态反馈可以使闭环系统的特征值配置在{-1,-2,-3}的受控系统状态空间描述为( )。
- 如果状态观测器系统的维数小于被观测系统的维数,则这种状态观测器为全维状态观测器。
- 用不大的控制能量,使系统输出尽可能保持在零值附近,这类问题称为输出调节器问题。
- 利用状态反馈任意配置系统全部闭环极点的充分必要条件是被控系统完全能控。
- 状态反馈既不改变系统的能控性,也不改变系统的能观测性。
- 系统的内部稳定性和外部稳定性是等价。
- 下面论述正确的是( )。
- 稳定性是系统的重要特性,是系统正常工作的必要条件。
- 外部稳定性,是通过零输入下的状态运动响应来描述系统的稳定性。
- 系统矩阵A的所有特征值均具有非正(负或零)实部是系统的每一个平衡状态是李亚普诺夫意义下稳定的充分条件。
- 系统的内部稳定性和外部稳定性在任何情况下都不等价。
- 系统是内部稳定的,就一定是外部稳定的。
- 能控性和能观测性是从控制和观测角度表征系统机构的两个基本特性。
- 所有具有对角规范形描述形式的系统都可用对角规范形能控性判据判别其能控性。
- 格拉姆矩阵能控性判据因计算简单,适用于高维系统的能控性判别。

- 能控性秩判据是基于系数矩阵A和C判断系统能观测性的一类判据。
- 构造多输入多输出系统能控规范形和能观测规范形,都需要面临一个共性的问题,即找出能控性判别矩阵中n个线性无关列或能观测判别矩阵中n个线性无关行。
- 零输入响应代表系统状态的自由运动,受外部输入变量的影响。
- 当且仅当状态方程的解为存在和唯一,对系统的运动分析才有意义。
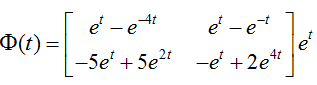
- 线性定常系统和线性时变系统的状态转移矩阵均为系统的矩阵指数函数。
- 零初态响应指系统初始状态为零时,由系统输入单独作用所引起的运动。
- 系统的状态转移矩阵由系统矩阵A唯一地确定。
- 一般线性系统状态方程的解由两部分组成,第一部分反映系统初态的影响,第二部分反映系统输入对状态的影响。

- 当状态空间描述中的A矩阵有相同的特征值时,一定不能将其化成对角规范形。
- 并联组合系统的传递函数矩阵为各并联子系统的传递函数矩阵之和。
- 线性定常系统线性非奇异变换后( )。
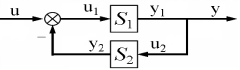
- 若两个子系统输出向量的维数相同,则可实现反馈连接。
- 坐标变换是指将系统在状态空间的一个基底上的表征,化为另一个基底上的表征。
- 状态空间描述能完全表征系统的一切动力学特征。
- 系统的状态是指能够完全表征系统时间域行为的一个最小内部变量组。
- 输入输出描述是描述系统输入变量和输出变量关系的模型。
- 系统的状态空间描述是唯一的。
- 经典控制理论以单变量线性定常系统作为主要的研究对象,以时域法作为研究控制系统动态特性的主要方法。
- 下述描述中哪些作为现代控制理论形成的标志( )。
- 研究系统控制的一个首要前提是建立系统的数学模型,线性系统的数学模型主要有两种形式,即时间域模型和频率域模型。
- 现代控制理论以多变量线性系统和非线性系统作为研究对象,以时域法,特别是状态空间方法作为主要的研究方法。
- 1892年俄国数学家李亚普诺夫发表了论文《运动稳定性的一般问题》,用严格的数学分析方法全面地论述了稳定性问题。
答案:具有能观规范形描述形式的系统一定是完全能观的;###具有能控规范形描述形式的系统一定是完全能控的;
答案:若一个系统的实现是既能控又能观的,则该实现是最小实现。###若一个系统的实现是维数最小的实现,则该实现是最小实现;
答案:

答案:
答案:
答案:

答案:完全能观测
答案:若一个系统是能控的,则它的对偶系统一定是能观的;
答案:
答案:
答案:对
温馨提示支付 ¥5.00 元后可查看付费内容,请先翻页预览!