第九章 现代控制理论基础:现代控制理论是在经典控制理论基础上发展起来的一门新兴学科。它在系统状态空间描述的基础上研究系统运动的全部动态过程,揭示系统内部的运动规律。本章主要介绍状态空间分析法的基本内容。9.1线性系统状态空间描述:本节主要介绍了线性系统的状态空间描述的基本概念和状态空间表达式的建立方法。[单选题]线性定常连续系统的能控性矩阵为 ( )选项:[
9.2系统状态方程的求解及系统能控性和能观性的判定:本节主要研究系统状态方程的求解方法和系统能控性和能观性的判定。
9.3线性定常系统的状态反馈与状态观测器:本节主要讨论线性定常系统的状态反馈的基本概念及状态反馈对系统性能的影响。
,
,
,
]

[单选题]
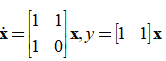
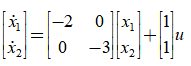 已知系统的状态方程为,则其状态转移矩阵
已知系统的状态方程为,则其状态转移矩阵 为 ( )选项:[
为 ( )选项:[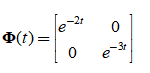
,
,
,
]
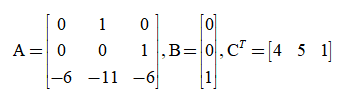
[多选题]判断连续时间系统{A,B, C}的可控性和可观测性,其中
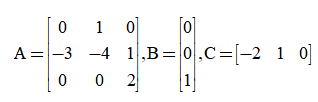
则下面正确的有有( )。 选项:[不可观测的;
, 不可控的;
, 可观测的;
, 可控的;
]
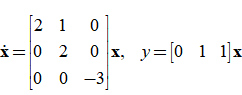
[判断题]系统
 是状态可观测的。( )选项:[对, 错]
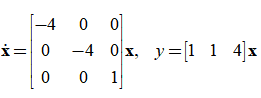
是状态可观测的。( )选项:[对, 错][判断题]系统
 是状态可观测的。( )选项:[错, 对]
是状态可观测的。( )选项:[错, 对][判断题]系统
 是状态可观测的。( )选项:[对, 错]
是状态可观测的。( )选项:[对, 错][判断题]对一个给定的系统,其状态空间表达式的表示是唯一的。( )选项:[对, 错]
[判断题]对一个给定的系统,状态变量的个数随状态空间表达式的不同而不同。( )选项:[对, 错]
[判断题]系统
 是系统能控的。( )选项:[对, 错]
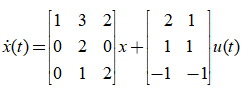
是系统能控的。( )选项:[对, 错][判断题]已知系统的系数矩阵如下:
则系统是完全可观的。( )选项:[错, 对]
温馨提示支付 ¥1.00 元后可查看付费内容,请先翻页预览!