青岛黄海学院
- 齐次坐标 [5,3,1,0] 表示的是无限远的向量。( )
- https://image.zhihuishu.com/zhs/question-import/formula/202309/3a3932d2e35a4b3f98e57f634c4aacde.png
- 机器人连杆两端轴线平行的时候的
 角为90°。( )
角为90°。( ) - 1962年,德沃尔与美国发明家约瑟夫·英格伯格成立了世界上第一家工业机器人制造工厂Unimation公司。( )
- 机器人相邻连杆之间的
 角可能为90°。( )
角可能为90°。( ) - https://image.zhihuishu.com/zhs/question-import/formula/202309/0e381d1b9e2246c883b8a2cc4ff37572.png
- RPY组合变换是相对于固定坐标系发生的。( )
- 机器人虽然在工农业上应用广泛,但不适合在恶劣或不适于人类工作的环境中执行任务。( )
- 齐次坐标 [6,3,0] 和 [4,2,0] 都是表示同一个方向。( )
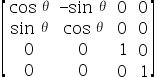 此矩阵表示绕x轴旋转。( )
此矩阵表示绕x轴旋转。( )- ZYZ欧拉角变换姿态矩阵是由三个旋转矩阵从左向右相乘。( )
 ( )
( )- https://image.zhihuishu.com/zhs/onlineexam/ansewerImg/202309/5baabc9713074dafb03d297ccae9c5e1.png
- 机器人的概念可以追溯到3000多年前,我国的西周时代。( )
- RPY组合变换姿态矩阵是由三个旋转矩阵从左向右相乘。( )
- 确定一个物体在三维空间中的状态需要有三个位置自由和三个姿态自由度。( )
- 柱面坐标来表示机械手手臂的平移变换时,保证变换后机器人末端相对基系的姿态不变,需最后绕末端系Z轴旋转-α。( )
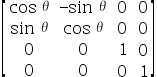 此矩阵表示绕z轴旋转。( )
此矩阵表示绕z轴旋转。( ) ( )
( )- Craig连杆四参数包含
 ,
, ,
, ,
, ( )
( ) - 位置自由度是确定物体的指向( )
- 机械手的运动姿态由某个姿态变换规定之后,它在基系中的位置就能够由左乘一个对应于矢量p的平移变换来确定。( )
- ZYZ欧拉角变换是相对于运动坐标系发生的。( )
- https://image.zhihuishu.com/zhs/onlineexam/ansewerImg/202309/e2995174ec7b42d4abcdffae124c524f.png
- 柱面坐标来表示机械手手臂的平移变换,相对于运动坐标系发生的。( )
- 齐次坐标 [1,0,0] 表示的是x 方向。( )
- 按用途可将机器人分为( )等种类。
- 机器人系统是由机器人和作业对象及环境共同构成的整体,其中包括( )几部分。
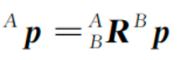
- 规定一个过渡坐标系{C} ,使{C} 的坐标原点与 {B } 的原点重合,而 {C} 的方位与{A} 的相同。据旋转坐标变换可得向过渡坐标系的变换( )
- 智能机器人应用的最新的智能技术包括( )。
- 明确机器人末端执行器的工作位置和方向,求解机器人各个连杆的位姿属于( )
- 如果连杆两端Z轴平行,那么
 =( )。
=( )。 - 坐标轴X方向的确定,通常分为( )种情况。
- 下列哪项不是自动控制面临严峻挑战的原因?( )
- 下列哪项不属于医用机器人的应用范围?( )
- 下列对机器人的定义中,( )不是机器人具有的特点。
 对时间的求导需要对( )。
对时间的求导需要对( )。- 气动驱动器使用空气作为工作介质,并使用气源发生器将压缩空气的压力能转换为( ),以驱动执行器以完成预定的运动。
- 相邻连杆公垂线之间的夹角通常表示为( )。
- 平移旋转方程( )
- PUMA560属于( )
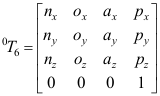 里面
里面 表示( )。
表示( )。- https://image.zhihuishu.com/zhs/onlineexam/ansewerImg/202309/2b0681968a2649cfbb0312a83b06e668.png
- 人工智能和自动控制的重要组成部分和研究领域,并被认为是通向自主机器递阶道路上自动控制的顶层的是( )。
- 物体能够对坐标系进行独立运动的数目称为( )
- 近年来随着与机器人相关领域的发展,控制系统相当于人体的( )。
A:错 B:对
答案:对
A:对 B:错
答案:
A:对 B:错
答案:错
A:对 B:错
答案:错
A:错 B:对
答案:对
A:错 B:对
答案:
A:错 B:对
答案:对
A:错 B:对
答案:A:错
A:对 B:错
答案:B:错
A:错 B:对
A:对 B:错
A:错 B:对
A:对 B:错
A:对 B:错
A:对 B:错
A:对 B:错
A:对 B:错
A:错 B:对
A:错 B:对
A:错 B:对
A:对 B:错
A:错 B:对
A:对 B:错
A:对 B:错
A:错 B:对
A:错 B:对
A:服务机器人 B:探索机器人 C:工业机器人或产业机器人 D:军用机器人
A:控制系统 B:驱动系统 C:机械系统 D:感知系统
A:
 B:
B: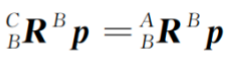 C:
C: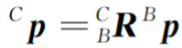 D:
D: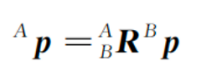
A:虚拟现实技术 B:人工神经网络技术 C:仿生技术 D:多智能体技术
A:积分求解 B:逆向求解 C:微分求解 D:正向求解
A:90° B:0° C:45° D:180°
A:2 B:1 C:3 D:4
A:科学技术间的相互影响和相互促进 B:基本概念和时代进程的推动 C:当前和未来应用的需求 D:生产力和生产技术发展迟缓
A:家用机器人 B:诊断机器人 C:护理机器人 D:步行式水下机器人
A:是人造的机器或机械电子装置 B:具有智力或感觉与识别能力 C:具有器官和繁殖能力 D:像人或人的上肢,并能模仿人的动作
A:不需要对
 求导
B:不需要对
求导
B:不需要对 求导
C:其他都不对
D:不需要对
求导
C:其他都不对
D:不需要对 求导
求导
A:光能 B:电能 C:内能 D:机械能
A:
 B:
B: C:
C: D:
D:
A:
 B:
B: C:
C: D:
D:
A:医用机器人 B:作战机器人 C:家用机器人 D:工业机器人
A:第六个连杆坐标相对于基座标X轴平移的距离 B:第六个连杆坐标相对于基座标Y轴平移的距离 C:第六个连杆坐标相对于基座标X轴旋转的角度 D:第六个连杆坐标相对于基座标Z轴平移的距离
A:连杆方向 B:左手定则 C:任意判定 D:右手定则
A:自适应/鲁棒控制 B:自学习控制 C:智能控制 D:最优控制
A:姿态 B:自由度 C:位置 D:位姿
A:肌肉 B:骨架 C:大脑 D:视觉、听力
温馨提示支付 ¥5.00 元后可查看付费内容,请先翻页预览!
