1.频率特性与传递函数之间没有关系。( )
A:对
B:错
答案:错
2.同一个幅频特性可能是最小相位环节,也可能是非最小相位环节。( )
A:错
B:对
答案:对
3.两个方框串联连接的系统的传递函数为()。( )
A:正确
B:错误
答案:错误
4.闭环幅频在处的斜率越陡,对高频正弦信号的衰减越快,抑制高频干扰的能力越弱。( )
A:正确
B:错误
答案:错误
5.超前校正的超前角的最大值为。( )
A:错误
B:正确
答案:正确
6.系统的结构图如图所示,其传递函数为( )。( )
A:正确
B:错误
答案:错误
7.频域特性虽然是系统对正弦信号的稳态响应,但是它不仅反映系统的稳态性能,而且还可以用来间接的研究系统的稳定性能和动态性能。( )
A:错误
B:正确
答案:错误
8.若系统的特征方程为 , 用劳斯判据判别使得系统稳定的K的范围( )。
, 用劳斯判据判别使得系统稳定的K的范围( )。
A:无论取任何值都不稳定
B:
C:
D:
答案:AI参考:正确答案是【D】劳斯判据判别使得系统稳定的K的范围是:当K为负值时,系统稳定;当K为正无穷大时,系统不稳定;当K为正值且小于1时,系统不稳定;当K大于等于1时,系统渐进稳定。对于题目中的特征方程,系统的特征方程为:x^4+x^3+kx^2+x+k=0。我们可以看到该特征方程的特征多项式是具有复根的,也就是说,这个系统是有不稳定性的。而系统的稳定性取决于k的值。如果k小于0,那么系统就是稳定的;如果k大于等于0,那么系统是不稳定的。因此,选项D是正确的。'
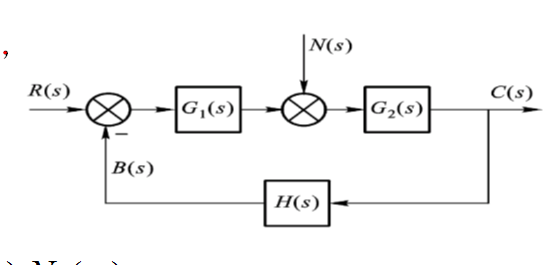
9.反馈系统的结构图如图所示,其输入作用下的闭环传递函数为( )。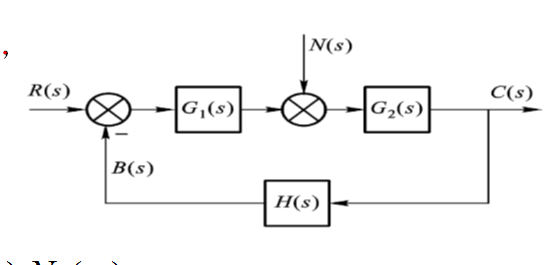
A:
B:
C:
D:
答案:AI参考:正确答案是D:\n反馈系统的结构图如图所示,其输入作用下的闭环传递函数为:1/(1+s/s_r)。\n\n解释:根据反馈系统的结构图,输入信号经过放大器、反相器、低通滤波器等环节后,进入反馈回路,最终输出信号再经过放大器反馈回系统。因此,闭环系统的传递函数为输入信号的输出信号比,即1/(1+s/s_r),其中s_r表示反馈回路的响应时间常数。所以选项D是正确的。'
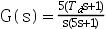
10.设校正网络的传递函数为
则 为( )
为( )
A:滞后-超前校正
B:滞后校正
C:串联超前校正
答案:AI参考:答案:C\n\n根据校正网络的传递函数可知,校正网络为超前校正网络,因此需要串联一个滞后校正网络,以改善系统的相位性能,使其具有较小的滞后。所以,选项C“串联超前校正”是正确的。'
11.已知系统的开环传递函数为 ,,则下面是其根轨迹上的点为( )。
,,则下面是其根轨迹上的点为( )。
A:
B:-4
C:0 D
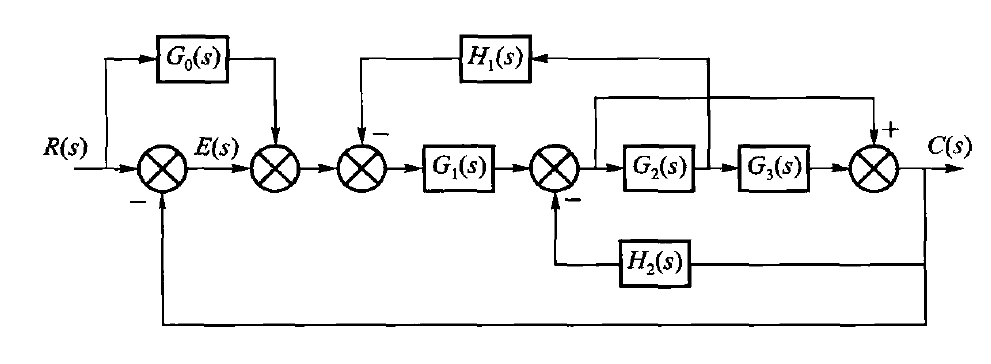
A: B: C: D: 13.系统的动态结构图如图所示,则R(s)到C(s)之间前向通道数为( )个。
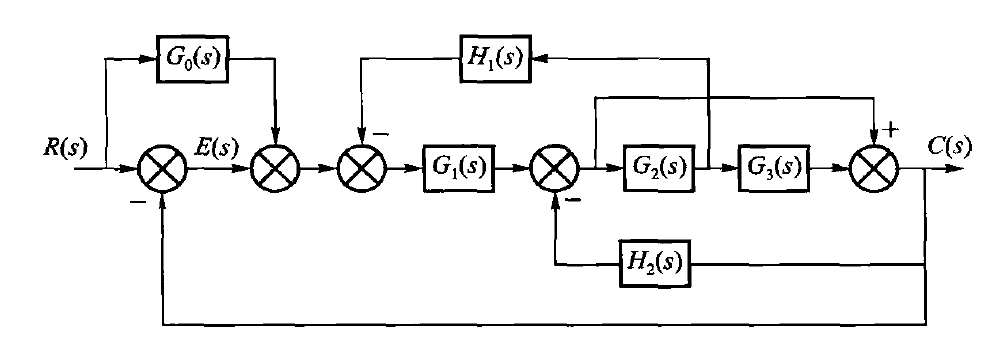
A:3 B:1 C:4 D:2 14.系统的动态结构图如图所示,则R(s)到E(s)之间前向通道数为( )个。
A:2 B:3 C:4 D:1 15.设系统的特征方程为
 ,则系统具有正实部根的个数为( )
,则系统具有正实部根的个数为( )A:3 B:0 C:1 D:2 16.下面关于积分环节不正确的是( )。
A:积分环节当输入消失时,它具有记忆功能 B:积分环节的输出量与出入量的积分成反比 C:积分环节动态关系为 D:积分环节的传递函数为 17.设正反馈系统的传递函数为
 , 则
, 则 时根轨迹的分离点为( )。
时根轨迹的分离点为( )。A:d=0 B:d=-2 C:无分离点 D:d=1 18.如图所示的炉温控制系统的控制方式为( )。
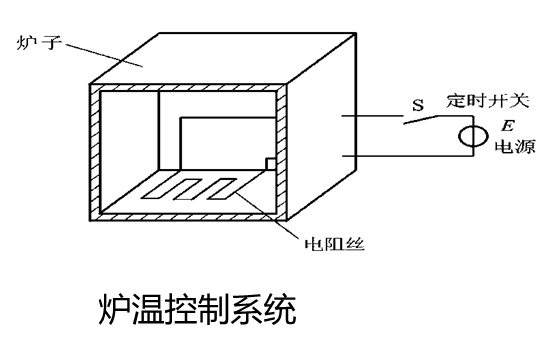
A:复合控制 B:按给定值操纵的开环控制 C:按偏差调节的闭环控制 D:按干扰补偿的开环控制 19.某系统的闭环传递函数为
 ,系统的主导极点为( )。
,系统的主导极点为( )。A:-4-9.2j B:没有主导极点 C:-4+9.2j D:-1.5 20.
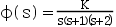
反馈校正环节的传递函数 为
为 时,称之为( )。
时,称之为( )。
A:位置反馈 B:加速度反馈 C:速度反馈 21.给定系统结构图如图所示。设计
 和
和 , 使得系统在
, 使得系统在  作用下稳态误差
作用下稳态误差 ,相稳定裕度
,相稳定裕度 ,截止频率
,截止频率 。
。请问在该题中选择何种校正方式?( )
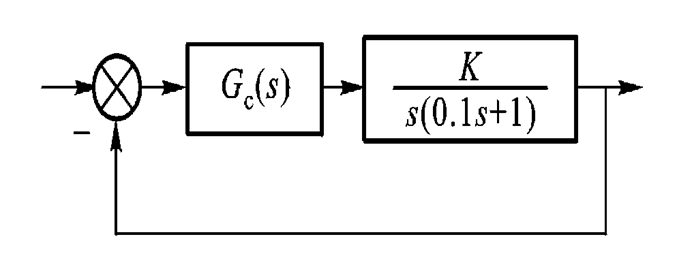
A:串联超前校正 B:滞后校正 C:滞后-超前校正 22.( )的控制精度较高。
A:按给定值操纵的开环控制 B:复合控制 C:按干扰补偿的开环控制 D:按偏差调节的闭环控制 23.设0型系统的开环传递函数为
 ,则当输入为
,则当输入为 时的稳态误差( )。
时的稳态误差( )。A:∞ B: C: D: 24.串联滞后校正参数的选取原则是使他的两个转折频率处于位于( )。
A:中频区 B:低频区 C:高频区 25.串联超前校正的校正环节的转折频率
 及
及 ,原则上应分别设在原截止频率( )。
,原则上应分别设在原截止频率( )。A:两侧 B:左侧 C:右侧 26.负反馈系统的开环传递函数为G(s)H(s),则系统的根轨迹的起始点为( )。
A:G(s)H(s)的零点 B:G(s)H(s)的极点 C:1+ G(s)H(s)的极点 D:1+ G(s)H(s)的零点 27.设正反馈系统的传递函数为
 , 则
, 则 时根轨迹的分支数为( )。
时根轨迹的分支数为( )。A:1 B:3 C:不确定 D:2 28.串联超前校正的超前角的最大值为 ,超前角的最大值发生在对数频率特性曲线的几何中心处,对应的角频率为 ,对应的幅值为 。( )
A:,, B:,, C:,, D:,, 29.
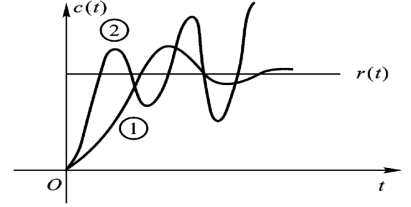
在上述的控制系统动态过程曲线中,( )是稳定的。
A:曲线② B:曲线① 30.已知负反馈系统的开环传递函数为
 ,则
,则 时,系统根轨迹的分支数( )。
时,系统根轨迹的分支数( )。A:3 B:4 C:1 D:2 31.下列关于阶跃响应的性能指标的说法正确的有( )。
A:稳态误差指当时间t趋于无穷时,系统单位阶跃响应的实际值与期望值之差。 B:调节时间值单位阶跃响应曲线的稳态值附近(如±5%误差带) C:超调量是指在响应过程中,超出稳态值的最大偏离量和稳态值之比 D:峰值时间是指单位阶跃响应曲线超过去稳态值而达到第一个峰值所需要的时间 32.下列关于改善二阶系统响应措施的说法正确的有( )。
A:比例微分控制抗干扰能力差,而速度反馈控制具有较强的抗干扰能力 B:比例微分控制的线路结构比较简单,成本低,而速度反馈控制部件比较昂贵 C:速度反馈控制能使得内部回路被包围部件的非线性特性,参数漂移等不利影响大大削弱。 D:比例微分控制和速度反馈控制都会使得等效阻尼比增大,改善系统的平稳性 33.复合校正又可分为( )。
A:反馈校正 B:前置校正 C:对控制作用的附加前置校正 D:对干扰的附加补偿校正 34.滞后校正的相频特性总是取负值,所以称为滞后校正,且相位滞后主要发生在频率
A:对 B:错 35.欠阻尼二阶系统的闭环传递函数为
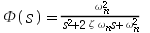 ,则当系统的输入为单位阶跃函数时,系统的峰值时间
,则当系统的输入为单位阶跃函数时,系统的峰值时间 。( )
。( )A:错 B:对 36.校正设计的任务是选择合适的校正装置的传递函数
 ,使得
,使得 形成的开环根轨迹,在要求增益下的主导极点,与期望的主导极点一致,从而保证闭环系统具有要求的动态性能指标。( )
形成的开环根轨迹,在要求增益下的主导极点,与期望的主导极点一致,从而保证闭环系统具有要求的动态性能指标。( )A:对 B:错 37.某系统的开环传递函数为
 ,则
,则 时系统根轨迹与虚轴的交点为
时系统根轨迹与虚轴的交点为 。( )
。( )A:对 B:错 38.
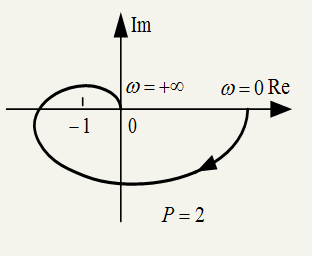
如图所示的系统是稳定的。( )
A:错 B:对 39.系统的闭环传递函数为
 ,则当系统的阻尼比0.5的时候,
,则当系统的阻尼比0.5的时候, 。( )
。( )A:对 B:错 40.系统的动态结构图如图所示,则系统输入到输出的前向通道数n为2。( )
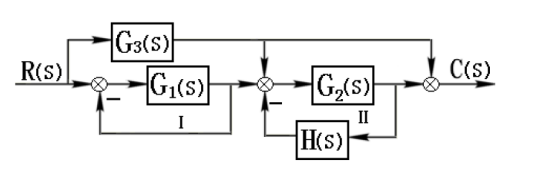
A:对 B:错

