

- 稳,快,准三个方面的性能指标往往由于被控对象的具体情况不同,各系统要求也有所侧重,而且同一个系统的稳、快、准的要求是相互制约的。( )


- 滞后校正是以牺牲快速性来换取稳定性和改善振荡性的。( )
- 叠加原理具有两重意义,即叠加性和均匀性或齐次性。( )

- 对控制系统性能的要求是:稳、快、准。其中稳指稳定性。( )
- 传递函数互为倒数的典型环节,对数幅频曲线关于0dB线对称。( )

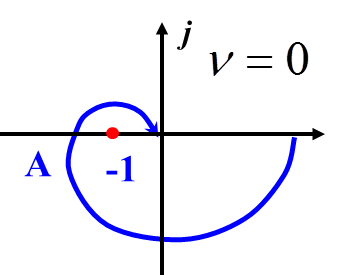
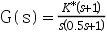
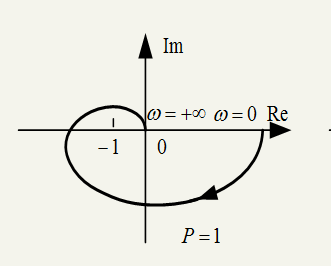
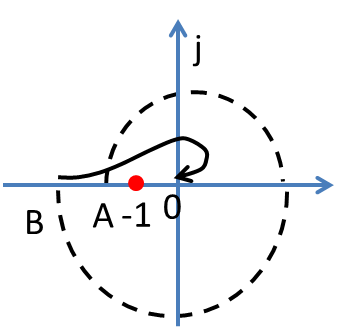
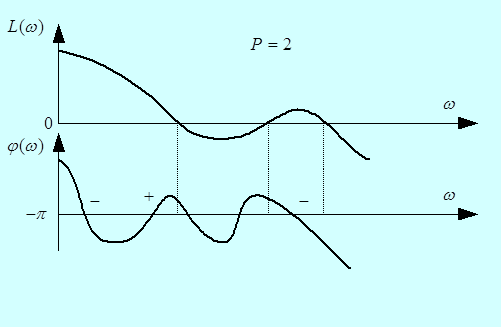
- 奈奎斯特曲线自上而下(或自下而上)地穿越(-1,j0)点左边的负实轴,相当于在伯德图中当L(ω)>0db时相频特性曲线自下而上(或自上而下)地穿越-180°线。( )
- 线性定常系统,在零初始条件下,系统的输出拉氏变换与输入拉氏变换之比称为系统的传递函数。( )
- 频率分析法是根据控制系统对正弦信号的稳态响应,即频率特性来分析系统的频域性能指标。( )
- 复合校正又可分为( )。
- 反馈校正的作用可概括为( )。


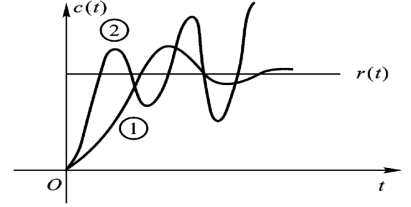
- 下列对过阻尼二阶系统说法错误的是( )。


- 下列对欠阻尼二阶系统的动态过程分析错误的是( )。


- 下面关于比例环节说法不正确的是( )。
- 关于稳定性的说法错误的是( )。
- 下面说法不正确的为( )。



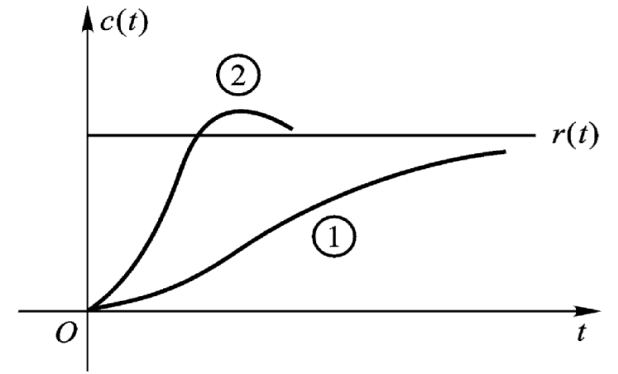
- 在系统跟踪过程中,被控量偏离给定值小,偏离的时间短,动态过程时间短,则该系统的动态精度高。( )
- 串联滞后校正起到了直接提高稳态精度的作用。( )

- 下列关于改善二阶系统响应措施的说法正确的有( )。
- 自动控制的基本控制方式可以分为( )。



- 下列关于零度根轨迹的说法不正确的是( )。

- 通常把系统受到外作用后,被控量随时间变化的全过程称为( )。



- 串联滞后校正的根轨迹法就是使开环增加一对零、极点,而且极点比零点更接近原点。( )

- 系统稳定的充分必要条件为:系统的特征根都具有负实部。( )

- 下面关于根轨迹绘制法则的说法正确的是( )。
- 系列关于系统稳定的条件不正确的是( )。


- 串联滞后校正参数的选取原则是使他的两个转折频率处于位于( )。

- 通常把系统受到外作用后,被控量随时间变化的全过程称为动态过程或者过渡过程。( )



- 幅频特性与相频特性统称为幅相频率特性或频率特性。( )
- 如果系统在s平面右半部具有开环极点或零点,这样的系统称为非最小相位系统。( )
- 系统的带宽反映了系统对噪声的滤波特性, 同时也反映了系统响应速度。带宽愈大,暂态响应速度愈快。( )
- 频域特性虽然是系统对正弦信号的稳态响应,但是它不仅反映系统的稳态性能,而且还可以用来间接的研究系统的稳定性能和动态性能。( )

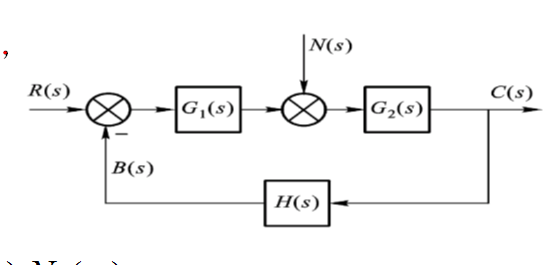
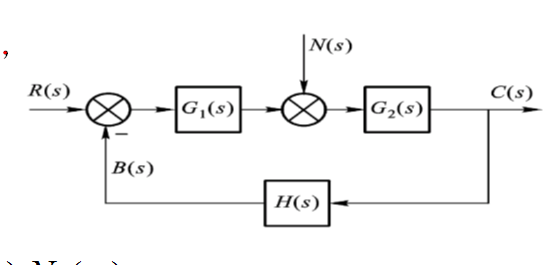
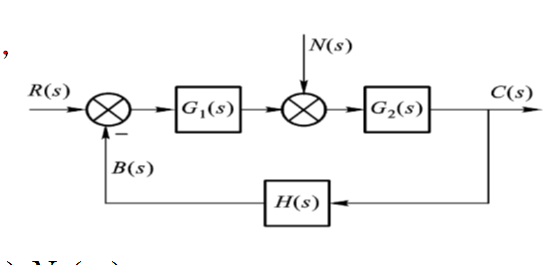
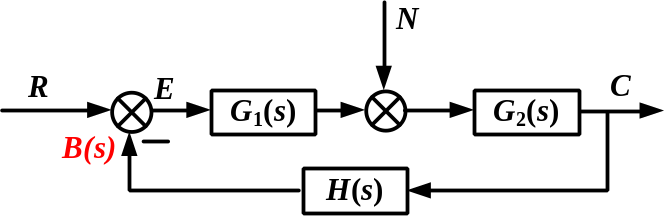
- 开环传递函数是前向通道的传递函数和反馈通道的传递函数的乘积。( )
- ( )反映了系统在控制过程中的性能。
- 下列对线性系统描述正确的有( )。
- 下列关于传递函数的说法错误的是( )。
- 系统的无差度反映了系统在时间幂函数输入下的复现能力,通常用( )来表示。
- 下面关于根轨迹与虚轴的交点的说法错误的是( )。


- 下列关于闭环零极点分布与阶跃响应关系的说法不正确的是( )。


- 负反馈系统的开环传递函数为G(s)H(s),则系统的根轨迹的起始点为( )。
- ( )的控制精度较高。




- 串联超前校正的超前角的最大值为 ,超前角的最大值发生在对数频率特性曲线的几何中心处,对应的角频率为 ,对应的幅值为 。( )

- 下面关于振荡环节不正确的是( )。
- 下面关于惯性环节不正确的是( )。
- PD校正器的作用相当于( )。
- 在工程实践中,常用的串联校正有( )。
- 校正设计的一个特点就是设计是唯一的。( )
- 由于校正装置加入系统的方式和所起的作用不同,可分为( )等校正方式。
- 对开环频率特性而言,常用的频域指标有( )。
- PI校正器的作用相当于( )。
- PID校正器的作用相当于( )。
- 对系统进行校正设计的方法大体可以分为( )。
- 常用的时域指标主要有( )。
- 对闭环幅频特性而言,常用的频域指标有( )。
- 低频段通常是指对数幅频渐近特性曲线在第一个转折频率以前的区段,这一段的特性完全由( )决定。

- 系统开环对数幅频的高频段,直接反映了系统对高频输入干扰信号的抑制能力。高频特性的分贝值越低,系统抗干扰的能力越强( )。

- 低频段与积分环节和开环增益有关,反应系统的快速性。( )
- 低频段、中频段和高频段等三个频段的划分有严格的确定准则。( )

- 中频段是指开环幅频特性曲线在截止频率附近的区段,该段反映了系统的( )。
- 高频段是指开环幅频特性曲线在中频段之后的区段,对动态响应的影响很大。( )
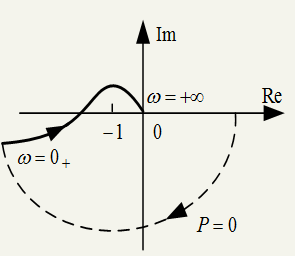
- 中频段反应系统的平稳性和快速性斜率为-40dB/dec最佳。( )




- 下列关于零度根轨迹的绘制法则说法正确的是( )。

- 1948年美国人( )提出了根轨迹法。






- 系列关于梅森公式的说法不正确的是( )。
- 一个系统的传递函数可以分解为若干个基本因子的乘积,每个基本因子就称为典型环节,常见典型环节的有( )。
- 下面对于叠加原理说法错正确的是( )。

- 下列关于传递函数的说法正确的有( )。
- 动态结构的基本单元为( )。

- 建立系统微分方程的一般步骤有( )。
- 稳、快、准中的“快”是指控制系统的快速性。( )
- 稳、快、准中的“稳”是指控制系统的稳定性。( )
- 开环控制的控制精度比闭环控制的控制精度高。( )
- 自动控制系统是一般由控制装置和被控对象组成。( )
- 稳态误差是衡量系统稳态精度的指标。( )
- 工程上常常从稳、快、准这个三个方面来评价自动控制系统的总体精度。( )
- 转台速度控制系统属于闭环控制系统。( )
- 自动洗衣机属于闭环控制。( )
- 系统稳定是保证系统正常工作的必要条件。( )
- 自动控制的任务是在无人直接参与的情况下,利用控制装置操纵被控对象,使被控制量等于给定值。( )
答案:对
答案:对
答案:对
答案:对
答案:错
答案:对
答案:对
答案:对
答案:错
答案:对
答案:错
温馨提示支付 ¥5.00 元后可查看付费内容,请先翻页预览!

