第六章单元测试
- 若已知某LTI系统的频率特性函数
 ,其输入为
,其输入为 ,则稳态输出为
,则稳态输出为 ( )
( ) - 已知某最小相位系统的幅相曲线如图所示,
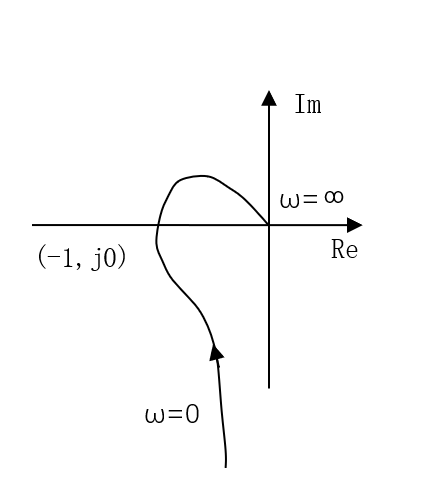
则其传递函数最有可能是( )。 - 已知系统的开环频率特性的极坐标图如下图所示,
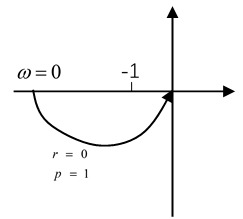
图中r是位于s平面原点的开环极点,p为位于右半s平面的开环极点数,则下面分析正确的是( )。 - 已知系统的开环频率特性的极坐标图如下图所示,
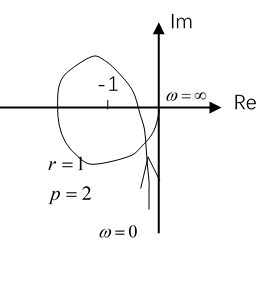
图中r是位于s平面原点的开环极点,p为位于右半s平面的开环极点数,则下面分析正确的是( )。 - 已知系统的开环传递函数为
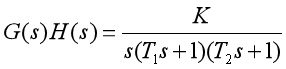 ,当K=10时,其奈氏图如下图所示,
,当K=10时,其奈氏图如下图所示,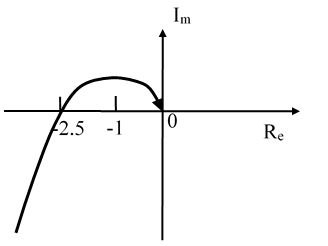
则下面分析正确的是( )。 - 已知某最小相位系统对数幅频特性近似如下图所示,
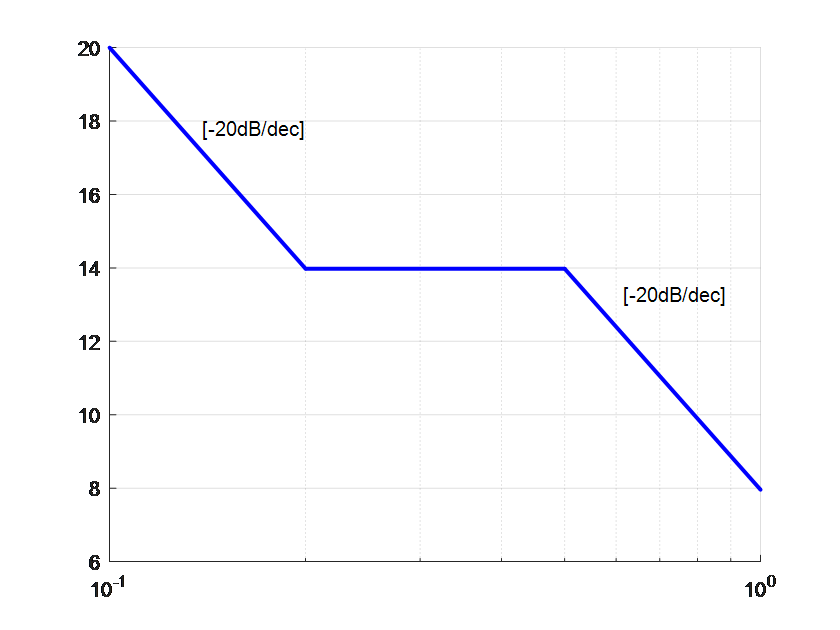
则其传函可能是( ) - 某最小相位系统传递函数为
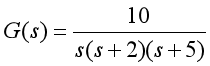 ,则当
,则当 时,其对数幅频特性渐近线方程为( )
时,其对数幅频特性渐近线方程为( ) - 某最小相位系统传递函数为,则当
 时,其相频特性方程为( )
时,其相频特性方程为( ) 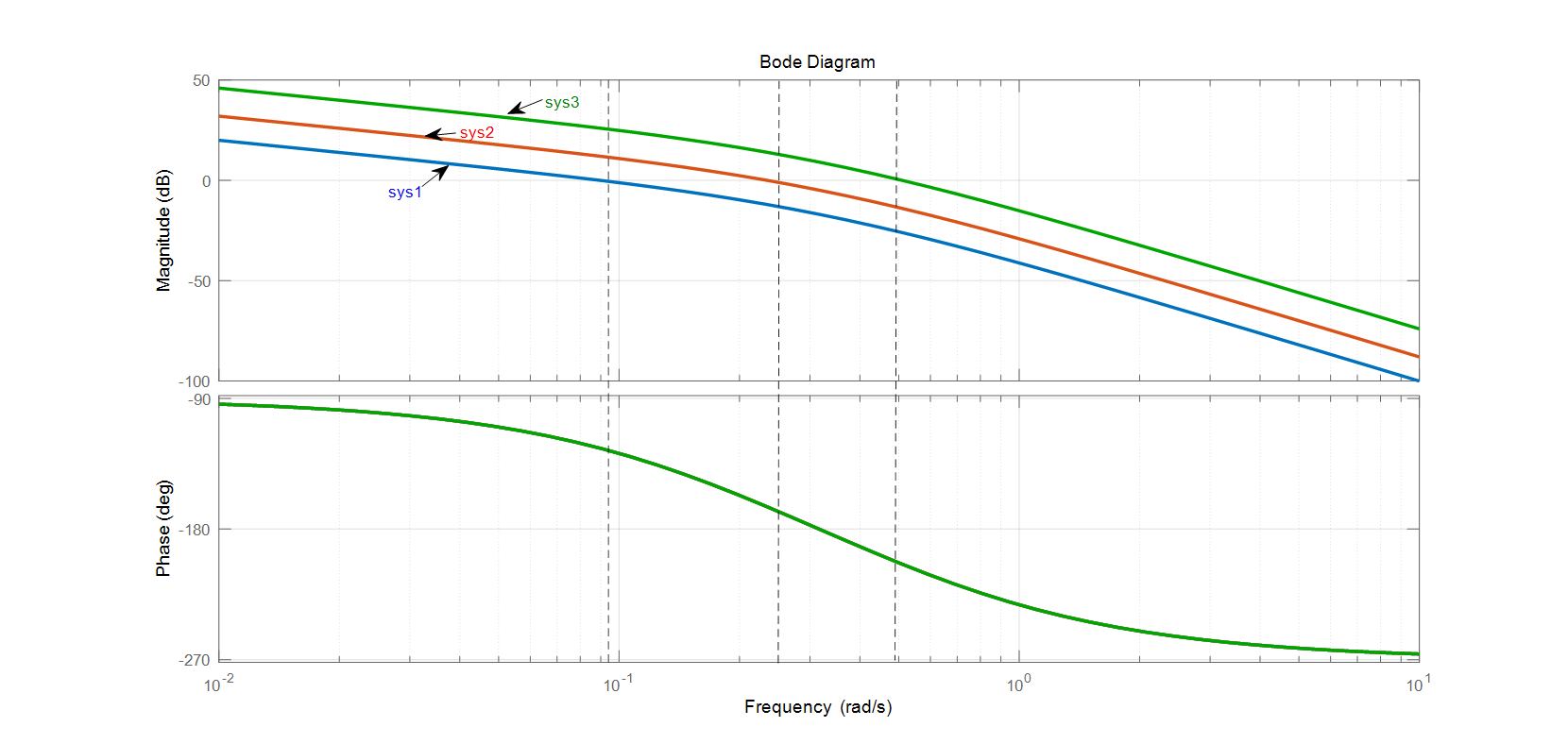
已知某三个控制系统的伯德图如上图所示,则有( )。- 某系统伯德图如图所示,
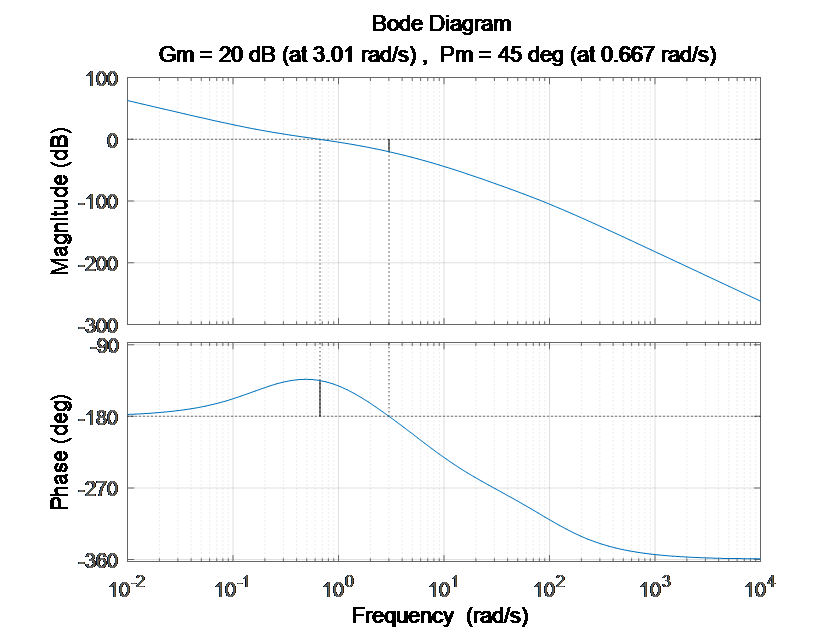
原系统剪切频率 ,相位裕量为
,相位裕量为 ;相位穿越频率
;相位穿越频率 ,增益裕量为
,增益裕量为 ,在此基础上系统增益K增大为原来的2倍,则下列说法正确的是( )。
,在此基础上系统增益K增大为原来的2倍,则下列说法正确的是( )。
A:

B:

C:

D:

答案:
A:
B:

C:
D:
A:系统为1型系统,其闭环系统稳定。
B:系统为1型系统,其闭环系统不稳定
C:系统为0型系统,其闭环系统稳定。
D:系统为0型系统,其闭环系统不稳定。
A:系统为1型系统,其闭环系统不稳定。
B:系统为1型系统,其闭环系统稳定。
C:系统为2型系统,其闭环系统稳定。
D:系统为2型系统,其闭环系统不稳定
A:该闭环系统稳定,且在K<11.5的范围内,系统都稳定。
B:该闭环系统不稳定,要系统稳定,则应为K<4
C:该闭环系统不稳定,要系统稳定,则应为K<8.5。
D:该闭环系统稳定,且在K<25的范围内,系统都稳定。
A:
B:
C:
D:
A:
B:
C:
D:
A:
B:
C:
D:
A:
B:
C:
D:
A:增加K之后,系统的相位穿越频率ωg不变,增益裕量减小为
 。
。B:增加K之后,系统的相位穿越频率ωg不变,增益裕量减小为
 。
。C:增加K之后,系统的相位穿越频率ωg会增加,增益裕量会减小。
D:增加K之后,系统的剪切频率ωc不变,相位裕量减小为
 。
。E:增加K之后,系统的剪切频率ωc会增加,相位裕量会减小。
温馨提示支付 ¥3.00 元后可查看付费内容,请先翻页预览!