第八章单元测试
- 已知系统的状态空间模型为
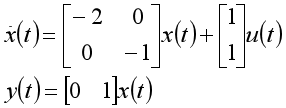 ,下列说法错误的是( )。
,下列说法错误的是( )。 - 已知系统的状态空间模型为
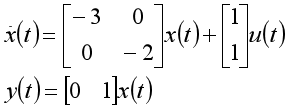 ,下列说法正确的是( )。
,下列说法正确的是( )。 - 下列说法正确的是( )。
- 下列说法正确的是( )。
- 已知某连续时间系统的状态变量的个数为5,能控性矩阵的秩为4,下列说法错误的是( )。
- 已知某连续时间系统的状态变量的个数为4,能观性矩阵的秩为3,下列说法正确的是( )。
- 已知某连续时间系统状态空间模型为
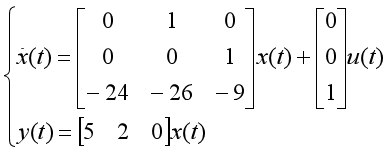 ,关于该系统下列说法错误的是( )。
,关于该系统下列说法错误的是( )。 - 已知某连续时间系统状态空间模型为,关于该系统下列说法错误的是( )。
- 已知某连续时间系统的状态变量的个数为6,能控性矩阵的秩为4,下列说法正确的是( )。
- 已知某系统的状态空间模型为
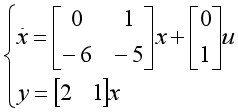 ,下列说法错误的是( )。
,下列说法错误的是( )。
A:该系统稳定。
B:该系统是连续时间系统。
C:该系统有两个状态变量。
D:可设计状态观测器来估计系统的状态,且可任意配置状态观测器的观测极点。
答案:可设计状态观测器来估计系统的状态,且可任意配置状态观测器的观测极点。
A:系统的特征根为3,2。
B:系统不稳定。
C:系统有2个状态变量。
D:系统的特征根为-3,-2。
E:系统稳定。
A:对任意能观的系统,则可以设计状态观测器来估计系统的状态。
B:对任意能控的系统,则可以设计状态观测器来估计系统的状态。
C:对任意能控的系统,则可以通过状态反馈任意配置闭环系统的极点。
D:对任意能观的系统,则可以通过状态反馈任意配置闭环系统的极点。
A:对连续时间系统进行状态反馈设计时,系统期望的极点须选在s平面的右半平面。
B:对任意系统,则可以通过状态反馈任意配置闭环系统的极点。
C:对于不稳定的系统,则不可进行状态反馈设计。
D:基于极点配置的状态反馈矩阵的设计方法是取设计后的系统的极点为期望极点而推导出来的。
A:系统不能控。
B:能控性结构分解是基于相似变换原理完成的。
C:按能控性结构分解,可知其能控子系统有4个状态变量。
D:按能控性结构分解,可知其不能控子系统有4个状态变量。
A:系统不能观,可以基于相似变换,可把系统分为能观子系统和不能观子系统两个部分。
B:按能观性结构分解时,可以从能观性矩阵中取1个线性无关的行向量,再任取3个行向量组成可非奇异矩阵
 ,即可根据相似变换原理进行结构分解。
,即可根据相似变换原理进行结构分解。C:按能观性结构分解,可知其能观子系统有3个状态变量。
D:按能观性结构分解时,可以从能观性矩阵中取3个线性无关的行向量,再任取1个行向量组成非奇异矩阵
,即可根据相似变换原理进行结构分解。A:该系统为有一个输入变量,一个输出变量。
B:该模型是能控标准型。
C:该模型为能观标准型。
D:该系统的传递函数为
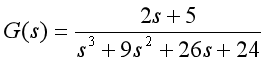 。
。A:根据该状态空间模型求取系统传递函数时,不存在零极点对消的情况。
B:该系统不能通过设计状态观测器来估计系统的状态。
C:该系统是能观的。
D:该系统是能控的。
A:按能控性结构分解时,可以从能观性矩阵中取4个线性无关的列向量,再任取2个列向量组成非奇异矩阵P,即可根据相似变换原理进行结构分解。
B:系统不能控,可以基于相似变换,可把系统分为能控子系统和不能控子系统两个部分。
C:按能控性结构分解,可知其能控子系统有4个状态变量。
D:按能观性结构分解时,可以从能观性矩阵中取4个线性无关的行向量,再任取2个行向量组成非奇异矩阵P,即可根据相似变换原理进行结构分解。
A:可通过状态反馈来任意配置闭环系统的极点。
B:当期望极点为-2,-7时,设计出的状态反馈矩阵为
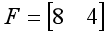 。
。C:当期望极点为-2,-7时,设计出的状态反馈矩阵为
 。
。D:设期望极点为-2,-7,则对应的期望多项式为
 。
。
温馨提示支付 ¥3.00 元后可查看付费内容,请先翻页预览!