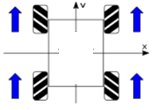
第三章测试1.一个四轮全向机器人,其驱动麦克纳姆轮布局如图所示,如果机器人想实现向绕中心顺时针旋转,则四个驱动麦克纳姆轮运动方式为:( )
A:
 B:
B: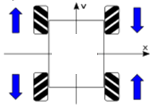 C:
C: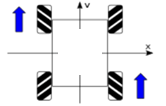
答案:C
2.
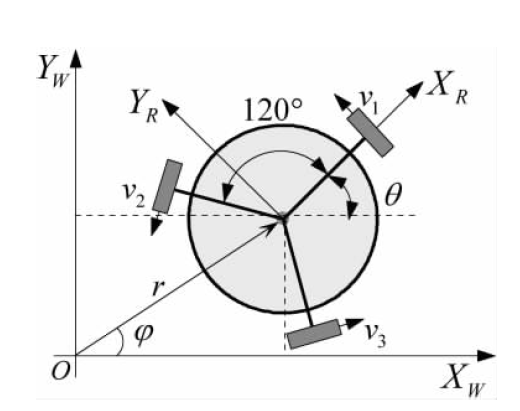 图示三轮机器人,在其自身坐标系下,YR方向上的速度,Vyr=( )?
图示三轮机器人,在其自身坐标系下,YR方向上的速度,Vyr=( )?A:
 B:
B: ;
C:
;
C: ;
3.
;
3.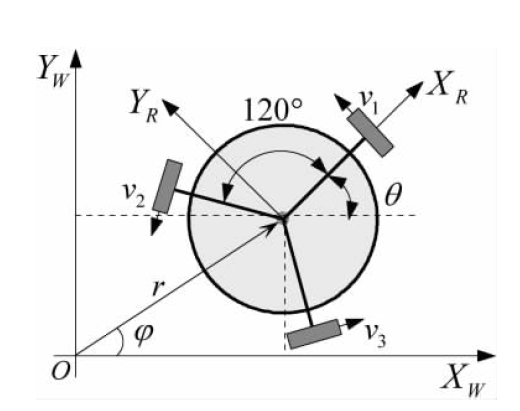 上图示三轮机器人,在其自身坐标系下,XR方向上的速度,Vxr=( )?
上图示三轮机器人,在其自身坐标系下,XR方向上的速度,Vxr=( )?A:
 ;
B:
;
B: ;
C:
;
C: 4.
4.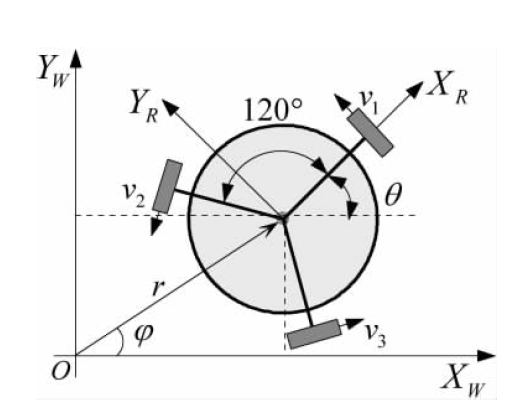 上图示三轮机器人,在地面坐标系下,XR方向上的速度,VxGnd=( )?
上图示三轮机器人,在地面坐标系下,XR方向上的速度,VxGnd=( )?A:
 ;
B:
;
B: ;
C:
;
C: 5.如果在Python环境中定义一个输入为机器人的运动特性Vx,Vy,Wr,输出为电机转动角速度w1,w2,w3的函数Kinematics,则正确的方式为:( )
5.如果在Python环境中定义一个输入为机器人的运动特性Vx,Vy,Wr,输出为电机转动角速度w1,w2,w3的函数Kinematics,则正确的方式为:( )A:[Vx,Vy,Wr]=Kinematics(w1,w2,w3) B:[w1,w2,w3 ]=Kinematics(Vx,Vy,Wr) C:(w1,w2,w3 )=Kinematics(Vx,Vy,Wr)
温馨提示支付 ¥3.00 元后可查看付费内容,请先翻页预览!