第三章单元测试
- 机械手是由一系列连在一起的( )构成。
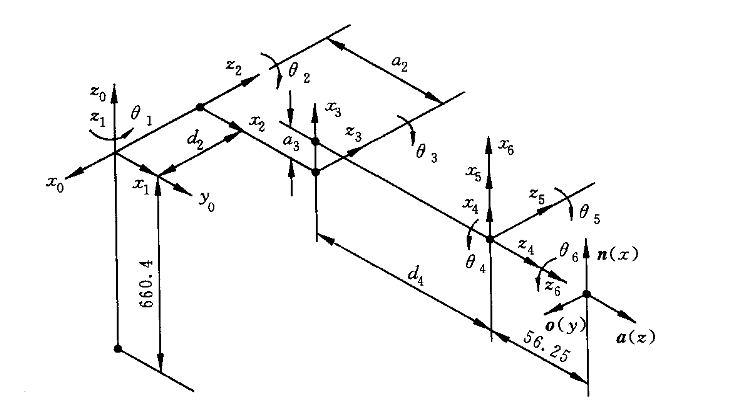
- 如图所示,a2 =( )
- 球面坐标来表示机械手手臂的位置,变换的顺序为:沿Z轴平移r,接着绕Y轴旋转β,最后沿Z轴旋转α。( )
- P是机械臂连杆2上的任意一点,那么
 对时间的求导一定是0。( )
对时间的求导一定是0。( ) - P是机械臂连杆2上的任意一点,且机械臂各个连杆位置随着抓取过程一直变化。那么
 是一个恒定值,
是一个恒定值, 是一个变量。( )
是一个变量。( )
A:设备 B:传感器 C:电机 D:连杆
答案:连杆
A:
 B:
B: C:
C: D:
D:
答案:
A:对 B:错
答案:对
A:错 B:对
答案:对
A:错 B:对
答案:对
