第六章机器人的质量矩阵一定是可逆的。( )
答案:对
在某一瞬时,机器人的离心力项与关节速度的平方成正比。( )
答案:对
机器人动力学方程中的重力项,只与关节角度(如果是移动关节,则为连杆间距)有关,而与它的导数无关。( )
答案:对
某单自由度机械臂(见图6-2)的总质量为,从静止开始,关节角按照如下的时间函数运动:,这里b、c是常数,已知该操作臂的质心为,惯性张量为,则该机械臂的势能P为常数。( )
答案:对
某单自由度机械臂(见图6-2)的总质量为
 ,从静止
,从静止 开始,关节角
开始,关节角 按照如下的时间函数运动:
按照如下的时间函数运动: ,这里b、c是常数,已知该操作臂的质心为
,这里b、c是常数,已知该操作臂的质心为 ,惯性张量为
,惯性张量为 ,则该机械臂关节力矩的值为( )。 某单自由度机械臂(见图6-2)的总质量为,从静止开始,关节角按照如下的时间函数运动:,这里b、c是常数,已知该操作臂的质心为,惯性张量为,则该机械臂的角速度为( )。 某单自由度机械臂(见图6-2)的总质量为,从静止开始,关节角按照如下的时间函数运动:,这里b、c是常数,已知该操作臂的质心为,惯性张量为,则该机械臂连杆质心
,则该机械臂关节力矩的值为( )。 某单自由度机械臂(见图6-2)的总质量为,从静止开始,关节角按照如下的时间函数运动:,这里b、c是常数,已知该操作臂的质心为,惯性张量为,则该机械臂的角速度为( )。 某单自由度机械臂(见图6-2)的总质量为,从静止开始,关节角按照如下的时间函数运动:,这里b、c是常数,已知该操作臂的质心为,惯性张量为,则该机械臂连杆质心 处的线速度为( )。 某单自由度机械臂(见图6-2)的总质量为,从静止开始,关节角按照如下的时间函数运动:,这里b、c是常数,已知该操作臂的质心为,惯性张量为,则该机械臂连杆质心处的线加速度为( )。 某单自由度机械臂(见图6-2)的总质量为
处的线速度为( )。 某单自由度机械臂(见图6-2)的总质量为,从静止开始,关节角按照如下的时间函数运动:,这里b、c是常数,已知该操作臂的质心为,惯性张量为,则该机械臂连杆质心处的线加速度为( )。 某单自由度机械臂(见图6-2)的总质量为 ,从静止
,从静止 开始,关节角
开始,关节角 按照如下的时间函数运动:
按照如下的时间函数运动: ,这里b、c是常数,已知该操作臂的质心为
,这里b、c是常数,已知该操作臂的质心为 ,惯性张量为
,惯性张量为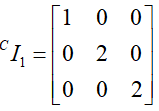 则该机械的动能K为( )
则该机械的动能K为( )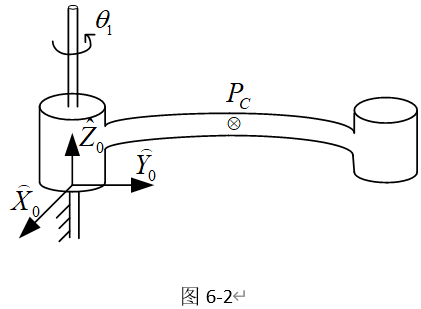 一个密度均匀的刚性圆柱体(见图6-1)质量为M,求坐标原点建在质心处时该圆柱体的惯性张量( )
一个密度均匀的刚性圆柱体(见图6-1)质量为M,求坐标原点建在质心处时该圆柱体的惯性张量( )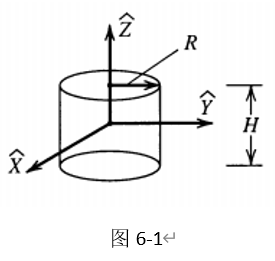
温馨提示支付 ¥3.00 元后可查看付费内容,请先翻页预览!