第一章测试1.主要用来产生偏差的元件称为( )。
A:放大元件
B:反馈元件 C:给定元件 D:比较元件
答案:D
2.开环控制系统和闭环控制系统结构上的主要区别是有无反馈。( )
A:错 B:对
答案:B
3.稳定性是指控制系统动态过程的振荡倾向和系统能够恢复平稳状态的能力。( )
A:错 B:对
答案:B
4.对自动控制系统的基本要求我们通常可以归结为三条,它们分别是( )。
A:稳定性 B:快速性 C:抗干扰性
D:准确性
答案:ABD
5.随动控制系统的分析与设计重点在于( )。
A:抗干扰性 B:快速性 C:准确性 D:其他选项都不对
答案:AC
1.自动控制系统能够自动对被控对象的被控量进行控制,主要组成部分为控制器和( )。
A:被控对象
B:放大元件
C:测量元件
D:校正元件
答案:A
2.被控对象指需要( )的机械、设备或生产过程。
A:放大
B:控制
C:测量
D:电动机
答案:B
3.自动控制系统按信号传送特点或系统结构特点可以分为( )。
A:开环控制系统、闭环控制系统和复合控制系统
B:连续控制系统和离散控制系统
C:线性系统和非线性系统
D:其余都对
答案:A
4.对不同的被控对象,系统对稳、快、准的要求有所侧重,下面说法正确的是( )。
A:提高过渡过程的快速性,可能会加速系统振荡
B:同一个系统中稳、快、准通常是相互制约的
C:恒值系统对平稳性要求严格,而随动系统对快和准要求高
D:改善平稳性,过渡过程可能会拖长,甚至使最终精度也变差。
答案:ABCD
5.时变控制系统是指系统参数( )的系统。
A:随输出信号变化
B:随输入信号变化
C:随时间变化
D:其余选项均错误
答案:C
6.下列系统中属于程控系统的是( )。
A:仿形机床
B:船舶驾驶舵位跟踪系统
C:数控机床
D:电阻炉微机温度控制系统
答案:AC
7.经典控制理论主要是以传递函数为基础,研究单输入单输出系统的分析和设计问题。( )
A:对 B:错
答案:A
8.稳定性是系统正常工作的先决条件,要求系统的输出量随时间延长而逐渐减小。( )
A:对 B:错
答案:B
9.工程上是从稳定性、快速性、准确性三方面来评价一个控制系统的性能优劣。( )
A:对 B:错
答案:A
10.工程上常见的恒压、恒速、恒温、恒定液位等控制系统都属于恒值系统。( )
A:错 B:对
答案:B
1.开环控制方式是按____进行控制的,反馈控制方式是按____进行控制的。( )
A:扰动;给定量
B:偏差;给定量
C:给定量;扰动
D:给定量;偏差
答案:D
2.只要系统稳定,控制偏差就会收敛,系统输出总能跟上期望值;若系统不稳定,控制偏差不会收敛,系统输出将发散,控制任务将无法完成。( )
A:对 B:错
答案:A
3.自动控制系统的_____是系统正常工作的先决条件( )
A:稳定性
B:稳态特性
C:动态特性
D:精确度
答案:A
4.系统的可控能力与被控对象和控制器无关。( )
A:对 B:错
答案:B
5.要实现高性能的反馈调节还需要进行深入的理论研究,确保控制系统做到“稳、准、快”。( )
A:对 B:错
答案:A
1.下列属于自动控制系统的是( )
A:由加热炉、热电偶、电桥、放大器、加热管实现炉温控制
B:技术员通过操作台控制机床生产速度
C:马桶水箱内液位控制
D:飞机自动驾驶系统
答案:ACD
2.下列关于反馈控制系统,说法正确的是( )
A:检测元件用于检测被控量
B:由被控对象和控制装置组成
C:控制器属于控制装置
D:反馈控制系统一定存在局部反馈校正
答案:ABC
3.关于开环控制说法错误的是( )
A:输出量不参与控制作用
B:适合于控制精度要求高的场合
C:信号传递是单方向的
D:能够使被控量按照一定的规律变化
答案:B
4.负反馈调节器的控制作用能够减小偏差,正反馈则恰恰相反。( )
A:错 B:对
答案:B
5.恒值控制系统设计的重点是研究各种扰动对被控对象的影响以及抗扰动的措施。( )
A:错 B:对
答案:B
1.自动控制系统中应用最多的控制方式是( )。
A:前馈控制
B:开环控制
C:复合控制
D:闭环控制
答案:D
2.关于开环控制说法错误的是( )。
A:信号传递是单方向的
B:能够使被控量按照一定的规律变化
C:适合于控制精度要求高的场合
D:输出量不参与控制作用
答案:C
3.自控系统的分类正确的是( )。
A:连续系统和非线性系统
B:线性系统和非线性系统
C:非线性系统和离散系统
D:连续系统和定常系统
答案:B
4.控制的精髓是( ) 。
A:反馈
B:无人为参与
C:前馈
D:动态调节
答案:A
5.前馈补偿控制属于基本控制方式中的哪种( )。
A:开环控制
B:复合控制
C:闭环控制
D:自动控制
答案:B
6.控制系统的性能指标有( )。
A:实时性
B:稳定性
C:准确性
D:快速性
答案:BCD
7.关于开环、闭环控制说法错误的是( )。
A:开环控制中控制作用于输出无关
B:闭环控制中控制作用于输出无关
C:开环控制抗干扰能力强
D:闭环控制抗干扰能力强
答案:BC
8.按照系统的输入信号形式,系统可分为( )。
A:采样控制系统
B:随动控制系统
C:恒值控制系统
D:程序控制系统
答案:BCD
9.反馈控制系统的基本组成主要包括(1)、(2)、(3)、和(4)。( )
A:被控对象
B:执行器
C:检测变送装置
D:控制器
E:阀门
F:控制目标
答案:ABCD
10.关于闭环控制说法正确的是:( )。
A:能够使被控量按照一定的规律变化
B:信号传递是单方向的
C:输出量不参与控制作用
D:适合于控制精度要求高的场合
答案:AD
1.
自动控制,就是在没有人参与的情况下,控制装置对被控对象施加操作,使得系统能够按照预定流程或状态运行,这种控制称之为自动控制。
A:对 B:错
答案:A
2.
自动控制系统一定是反馈控制系统。
A:错 B:对
答案:A
3.
线性系统可分为时变系统和定常系统。
A:对 B:错
答案:A
4.
稳定性是自动控制系统中受关注的重要性能。
A:错 B:对
答案:B
5.
自动控制方式有()
A:复合控制 B:开环控制 C:反馈控制
答案:ABC
1.
关于自动控制系统概念的理解正确的是?
A:自动控制系统需要人的直接参与即可自动完成控制任务 B:自动控制系统不需要人的参与即可自动完成控制任务 C:自动控制系统不需要人的直接参与即可自动完成控制任务
答案:C
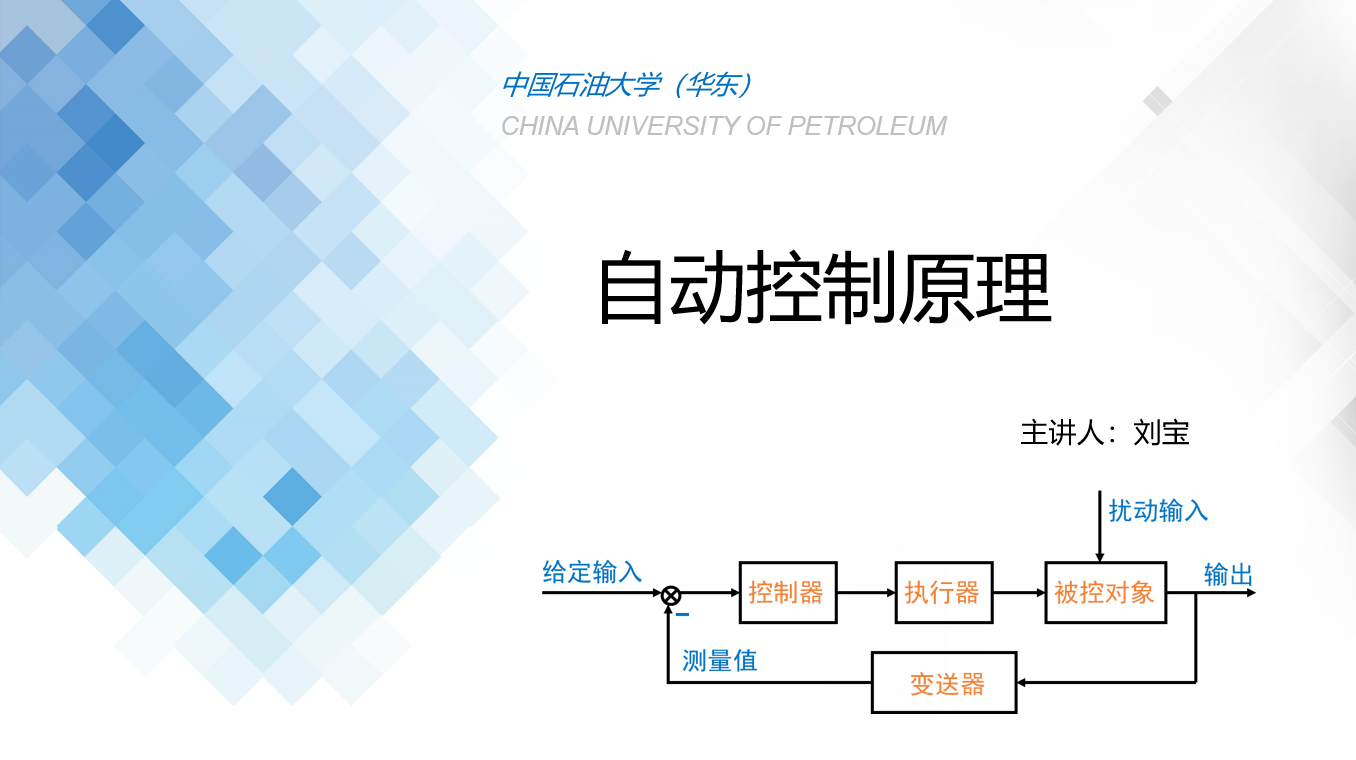
2.自动控制系统的组成说明正确的是?
A:自动控制系统包括控制系统的输入、控制器、执行器、被控对象和传感器和控制系统输出等 B:自动控制系统包括比较环节、控制器、执行器、被控对象和传感器五部分 C:自动控制系统包括控制器、执行器、被控对象和传感器四部分 D:自动控制系统包括控制器、被控对象和传感器三部分
答案:C
3.
关于自动控制系统的反馈控制方式说法错误的是?
A:具有抑制外扰动对被控量产生影响的能力 B:具有较高的控制精度 C:控制精度完全取决于所用元件及校准的精度 D:具有抑制内扰动对被控量产生影响的能力
答案:C
4.自动控制系统的广义被控对象由哪几部分组成?
A:控制器、测量元件、被控对象 B:控制器、执行元件、测量元件 C:控制器、执行元件、被控对象 D:执行元件、被控对象、测量元件
答案:D
5.关于开环系统的叙述正确的是?
A:控制装置与被控对象之间只有反向联系而没有顺向作用的控制过程 B:控制装置与被控对象之间既没有顺向作用也没有反向联系的控制过程 C:控制装置与被控对象之间只有顺向作用而没有反向联系的控制过程 D:控制装置与被控对象之间既有顺向作用又有反向联系的控制过程
答案:C
6.下列说法不是开环控制系统的特性?
A:结构简单经济 B:调试方便 C:抗干扰能力差,控制精度不高 D:系统具有减小或消除偏差的能力
答案:D
7.自动控制系统的准确性通过哪个性能指标判断?
A:调节时间 B:上升时间 C:超调量 D:稳态误差
答案:D
8.将水槽中的液位高度控制在一个恒定值,这样的系统是一个( )。
A:恒值控制系统 B:随动控制系统 C:程序控制系统 D:离散控制系统
答案:A
9.
某系统微分方程为 ,则该系统是线性的。
,则该系统是线性的。
A:错 B:对
答案:A
10.
 该系统是线性的。
该系统是线性的。
A:错 B:对
答案:A
1.系统和输入已知,求输出并对动态特性进行研究,称为( )
A:系统辨识
B:系统综合
C:系统设计
D:系统分析
答案:D
2.通过测量输出量,产生一个与输出信号存在确定函数比例关系值的元件称为( )
A:反馈元件
B:比较元件
C:放大元件
D:给定元件
答案:A
3.在直流电动机调速系统中,霍尔传感器是用作( )反馈的传感器。
A:电流
B:位移
C:速度
D:电压
答案:A
4.系统已给出,确定输入,使输出尽可能符合给定的最佳要求,称为( )
A:最优控制
B:系统辨识
C:系统分析
D:最优设计
答案:A
5.时域分析的性能指标,哪个指标是反映相对稳定性的( )
A:峰值时间
B:调整时间
C:上升时间
D:最大超调量
答案:D
6.直接对控制对象进行操作的元件称为( )
A:比较元件
B:给定元件
C:放大元件
D:执行元件
答案:D
7.主要用来产生偏差的元件称为( )
A:反馈元件
B:给定元件
C:放大元件
D:比较元件
答案:D
8.主要用于产生输入信号的元件称为( )
A:反馈元件
B:给定元件
C:放大元件
D:比较元件
答案:B
9.“现代控制理论”的主要内容是以( )为基础,研究多输入、多输出等控制系统的分析和设计问题。
A:复变函数模型
B:状态空间模型
C:线性空间模型
D:传递函数模型
答案:B
10.主要用于稳定控制系统,提高性能的元件称为( )
A:校正元件
B:反馈元件
C:比较元件
D:给定元件
答案:A
1.我们家用抽水马桶中的水箱水位控制系统是一个闭环控制系统。( )
A:错 B:对
答案:B
2.在光伏发电控制系统中,因为光照的间歇性、波动性等,其输出电压与电流通常都是实时波动的,然而基于经济效益的需求,通常会采取最大功率点跟踪的控制方法来保障系统输出功率的最大化。请问最大功率跟踪控制属于哪一类控制( )
A:线性控制系统
B:开环控制系统
C:闭环控制系统
D:非线性控制系统
E:最优控制系统
答案:CD
3.书第16页 1-9题中,图1-21所示的水箱水位控制系统的控制器是( )
A:出水阀门
B:浮子
C:水箱
D:连杆与铰链
E:入水阀门
答案:D
1.开环系统是由( )组成的。
A:被控对象-执行元件-放大器 B:被控对象-执行元件-控制器 C:被控对象-测量元件-放大器 D:信号发生器-执行元件-放大器
答案:A
2.开环系统的优点是( )。
A:稳定性好-价格低廉-安装调试简单 B:结构简单-价格低廉-安装调试简单 C:结构简单-价格低廉-控制精度高 D:结构简单-抗干扰力强-安装调试简单
答案:B
3.闭环系统的优点是( )。
A:封闭性好 B:抗干扰力强 C:价格低廉 D:结构简单
答案:B
4.反馈通道的元件称为( )。
A:执行元件 B:放大元件 C:比较元件 D:测量元件
答案:D
5.对控制系统的基本要求有( )。
A:稳定性-快速性-平稳性-精确性 B:鲁棒性-快速性-平稳性-精确性 C:稳定性-鲁棒性-平稳性-精确性 D:稳定性-快速性-平稳性-抗干扰性
答案:A
温馨提示支付 ¥3.00 元后可查看付费内容,请先翻页预览!