第八章测试1.奈奎斯特稳定判据对于非最小相角系统是不适用的。
A:对 B:错
答案:B
2.非线性系统的稳定性与( )有关。
A:系统的参数 B:系统的初始条件 C:系统的结构 D:系统的输入信号 3.
某非线性系统的G(jw)曲线和描述函数负倒数曲线如下图所示,那么该闭环系统( )

A:
自激振荡
B:稳定
C:不稳定
4.某非线性系统的G(jw)曲线和描述函数负倒数曲线如下图所示,那么该闭环系统( )

A:
自激振荡
B:不稳定
C:稳定
5.某非线性系统的G(jw)曲线如下图所示,那么N0点的周期运动是( )的。

A:
不稳定
B:稳定
6.某非线性系统的G(jw)曲线如下图所示,那么N0点的周期运动是( )的。

A:
不稳定
B:稳定
7.某非线性系统的G(jw)曲线如下图所示,那么N10点的周期运动是( )的。

A:
稳定
B:不稳定
8.某非线性系统的G(jw)曲线如下图所示,那么N20点的周期运动是( )的。
A:
稳定
B:不稳定
9.某非线性系统的G(jw)曲线如下图所示,那么N10点的周期运动是( )的。

A:
稳定
B:不稳定
10.某非线性系统的G(jw)曲线如下图所示,那么N20点的周期运动是( )的。

A:
稳定
B:不稳定
1.已知系统的状态空间模型为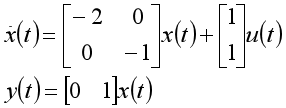 ,下列说法错误的是( )。
,下列说法错误的是( )。A:可设计状态观测器来估计系统的状态,且可任意配置状态观测器的观测极点。
B:该系统是连续时间系统。
C:该系统有两个状态变量。
D:该系统稳定。
2.已知系统的状态空间模型为
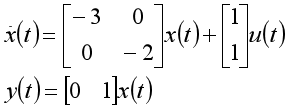 ,下列说法正确的是( )。
,下列说法正确的是( )。A:系统有2个状态变量。
B:系统稳定。
C:系统不稳定。
D:系统的特征根为3,2。
E:系统的特征根为-3,-2。
3.下列说法正确的是( )。
A:对任意能观的系统,则可以通过状态反馈任意配置闭环系统的极点。
B:对任意能观的系统,则可以设计状态观测器来估计系统的状态。
C:对任意能控的系统,则可以设计状态观测器来估计系统的状态。
D:对任意能控的系统,则可以通过状态反馈任意配置闭环系统的极点。
4.下列说法正确的是( )。
A:对于不稳定的系统,则不可进行状态反馈设计。
B:对任意系统,则可以通过状态反馈任意配置闭环系统的极点。
C:对连续时间系统进行状态反馈设计时,系统期望的极点须选在s平面的右半平面。
D:基于极点配置的状态反馈矩阵的设计方法是取设计后的系统的极点为期望极点而推导出来的。
5.已知某连续时间系统的状态变量的个数为5,能控性矩阵的秩为4,下列说法错误的是( )。
A:系统不能控。
B:能控性结构分解是基于相似变换原理完成的。
C:按能控性结构分解,可知其能控子系统有4个状态变量。
D:按能控性结构分解,可知其不能控子系统有4个状态变量。
6.已知某连续时间系统的状态变量的个数为4,能观性矩阵的秩为3,下列说法正确的是( )。
A:按能观性结构分解时,可以从能观性矩阵中取3个线性无关的行向量,再任取1个行向量组成非奇异矩阵
 ,即可根据相似变换原理进行结构分解。
,即可根据相似变换原理进行结构分解。B:按能观性结构分解,可知其能观子系统有3个状态变量。
C:系统不能观,可以基于相似变换,可把系统分为能观子系统和不能观子系统两个部分。
D:按能观性结构分解时,可以从能观性矩阵中取1个线性无关的行向量,再任取3个行向量组成可非奇异矩阵
,即可根据相似变换原理进行结构分解。7.已知某连续时间系统状态空间模型为
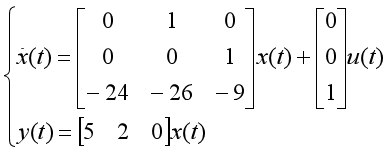 ,关于该系统下列说法错误的是( )。
,关于该系统下列说法错误的是( )。A:该系统的传递函数为
 。
。B:该模型是能控标准型。
C:该模型为能观标准型。
D:该系统为有一个输入变量,一个输出变量。
8.已知某连续时间系统状态空间模型为
,关于该系统下列说法错误的是( )。A:该系统是能观的。
B:根据该状态空间模型求取系统传递函数时,不存在零极点对消的情况。
C:该系统是能控的。
D:该系统不能通过设计状态观测器来估计系统的状态。
9.已知某连续时间系统的状态变量的个数为6,能控性矩阵的秩为4,下列说法正确的是( )。
A:按能控性结构分解,可知其能控子系统有4个状态变量。
B:按能控性结构分解时,可以从能观性矩阵中取4个线性无关的列向量,再任取2个列向量组成非奇异矩阵P,即可根据相似变换原理进行结构分解。
C:按能观性结构分解时,可以从能观性矩阵中取4个线性无关的行向量,再任取2个行向量组成非奇异矩阵P,即可根据相似变换原理进行结构分解。
D:系统不能控,可以基于相似变换,可把系统分为能控子系统和不能控子系统两个部分。
10.已知某系统的状态空间模型为
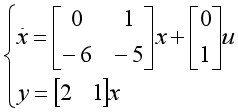 ,下列说法错误的是( )。
,下列说法错误的是( )。A:当期望极点为-2,-7时,设计出的状态反馈矩阵为
 。
。B:设期望极点为-2,-7,则对应的期望多项式为
 。
。C:可通过状态反馈来任意配置闭环系统的极点。
D:当期望极点为-2,-7时,设计出的状态反馈矩阵为
 。
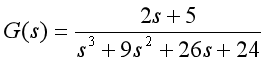
。1.已知系统的传递函数为
 ,其可控标准型的状态、输入和输出方程为( )。
,其可控标准型的状态、输入和输出方程为( )。A:
 B:
B: C:
C: D:
D: 2.求解齐次状态方程
2.求解齐次状态方程 的解是( )
的解是( )A:
 B:
B: C:
C: D:
D: 3.已知系统的状态方程
3.已知系统的状态方程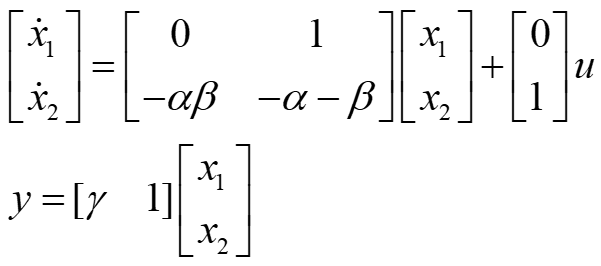 ,下列哪一组取值能确保试系统是完全能控和能观的( )。
,下列哪一组取值能确保试系统是完全能控和能观的( )。A:α=0,β=1,γ=1 B:α=1,β=0,γ=1 C:α=1,β=1,γ=1 D:α=1,β=1,γ=0 4.二次型
 是( )。
是( )。A:半正定的 B:半负定的 C:负定的 D:正定的 5.给定单输入单输出线性定常系统的状态空间表达式为
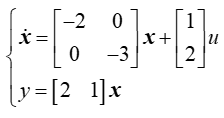 ,对该系统设计一个全维状态观测器,使观测器的极点为-2±j,则该观测器增益矩阵为( )。
,对该系统设计一个全维状态观测器,使观测器的极点为-2±j,则该观测器增益矩阵为( )。A:
 B:
B: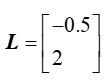 C:
C: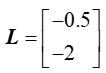 D:
D: 1.非线性系统的频率响应可能发生畸变。( )
1.非线性系统的频率响应可能发生畸变。( )A:错 B:对 2.自激振荡都是不稳定的振荡过程。( )
A:对 B:错 3.描述函数是一种近似方法,线性部分是一个高通滤波器。( )
A:对 B:错 4.系统非线性不太严重时,可以通过一些方法将其视为线性系统处理。( )
A:对 B:错 5.描述函数表达了非线性元件对基波正弦量的传递能力。( )
A:错 B:对 6.饱和特性会使系统的跟踪速度加快。( )
A:对 B:错 7.继电特性可抑制系统发散,但容易导致自振。( )
A:对 B:错 8.非线性系统虽不具备齐次性,但满足叠加原理。( )
A:对 B:错 9.关于图中系统的自持振荡点说法正确的是
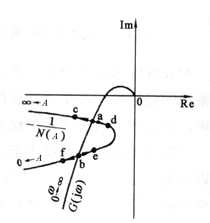 ( )。
( )。A:b点是稳定的工作点,可以形成自振荡
B:e点和f点是稳定的工作点
C:a点是稳定的工作点,可以形成自振荡
D:b点不是稳定的工作点,不能形成自振荡
10.系统中有二个非线性元件串联,其描述函数分别为
 和
和 ,则化简后的描述函数必是( )。
,则化简后的描述函数必是( )。A:
B:
C:
D:需重新分析计算
1.非线性系统的特征有( )
A:稳定性分析复杂
B:满足叠加原理
C:可能存在自激振荡现象
D:频率响应发生畸变
2.极限环的类型有( )
A:稳定的极限环
B:临界极限环
C:半稳定极限环
D:不稳定极限环
3.描述函数法可以确定系统的稳定性与是否产生振荡。( )
A:对 B:错 4.相平面法适合能够判断非线性系统的稳定性与稳态误差。( )
A:对 B:错 5.相平面法是一种频域分析方法。( )
A:错 B:对
温馨提示支付 ¥3.00 元后可查看付费内容,请先翻页预览!