第四章测试1.根轨迹法是利用——在S平面上的分布,通过图解的方法求取——的位置( )。
A:开环零、极点;闭环零点 B:闭环零、极点;开环零点 C:开环零、极点;闭环极点 D:闭环零、极点;开环极点
答案:C
2.相角条件是根轨迹存在的( )。
A:必要条件 B:充分条件 C:充要条件 D:都不对 3.闭环零点由开环前向通路传递函数的——和反馈通路传递函数的——组成( )。
A:极点,极点 B:极点,零点 C:零点,极点 D:零点,零点 4.
单位负反馈系统的开环传递函数为 ,根轨迹中的汇合点为( )
,根轨迹中的汇合点为( )
A:-2 B:-2.414 C:0.414 D:-1.586 5.
单位负反馈系统的开环传递函数为 ,利用根轨迹法,使闭环系统临界稳定时的z值为( )
,利用根轨迹法,使闭环系统临界稳定时的z值为( )
A:7.2 B:9 C:12.8 1.常规根轨迹也称为180度根轨迹。( )
A:错 B:对 2.根轨迹离开系统开环复数零点处的切线与正实轴的夹角,称为起始角。( )
A:对 B:错 3.当开环有限极点数n大于有限零点数m时,有n-m条根轨迹分支沿渐近线趋向无穷远处。( )
A:错 B:对 4.控制系统闭环极点只与开环零点、开环极点有关。( )
A:错 B:对 5.根轨迹只有180度根轨迹。( )
A:错 B:对 1.下述说法正确的是( )
A:根轨迹方程就是系统的闭环特征方程。
B:模条件和角条件联立就是系统的闭环特征方程。
C:模条件方程就是系统的闭环特征方程。
D:角条件方程就是系统的闭环特征方程。
2.有角条件导出的根轨迹绘制规则有( )
A:根轨迹的分离汇合点坐标。
B:复极点的出射角和复零点的入射角。
C:实轴上的根轨迹。
D:根轨迹渐近线的方向角。
3.绘制正反馈根轨迹,需要做调整的绘制规则有。( )
A:时轴上的根轨迹分布。
B:分离汇合点的分离角和汇合角。
C:根轨迹在复零点和复极点的入射出射角。
D:渐近线的方向角。
4.根轨迹的正确定义是( )
A:根轨迹就是开环系统特征根的位置
B:根轨迹是当系统开环传递函数中某一参数从零到无穷变化时开环系统特征方程的特征根在复平面上变化的轨迹。
C:根轨迹就是闭环系统特征根的位置
D:根轨迹是当系统开环传递函数中某一参数从零到无穷变化时闭环系统特征方程的特征根在复平面上变化的轨迹。
5.关于根轨迹说法错误的是:( )
A:关于实轴对称。
B:始于开环极点,终止于开环零点和无穷远点。
C:对于180度根轨迹而言,时轴上右侧开环零几点个数和是奇数的部分为根轨迹。
D:当开环零点数小于开环极点数时,根轨迹条数等于开环零点数。
1.开环传递函数
 有几条根轨迹( )。
有几条根轨迹( )。 A:2
B:1
C:3
D:0
2.开环传递函数
 有几条渐近线( )。
有几条渐近线( )。 A:3
B:1
C:2
D:0
3.开环传递函数出
 根轨迹在实轴上的分布是( )。
根轨迹在实轴上的分布是( )。A:(-∞,-3)
B:[-3,-2]
C:[-∞,-3]
D:[0,∞]
4.开环传递函数出
 根轨迹分离点坐标d是( )。
根轨迹分离点坐标d是( )。A:-0.586
B:0.586
C:3.414
D:-3.414
5.开环传递函数出
 根轨迹与虚轴交点是( )。
根轨迹与虚轴交点是( )。A:ω=1.1,k=-8.16
B:ω=0,k=0
C:ω=1.1,k=8.16
D:ω=-1.1,k=-8.16
6.根轨迹是开环系统某一参数从零变化到无穷时,开环系统特征方程式的根在S平面上变化的轨迹。( )
A:错 B:对 7.根轨迹方程中相角条件是确定S平面上根轨迹的充分必要条件。( )
A:对 B:错 8.主导极点既可以是闭环极点,也可以是输入极点。( )
A:错 B:对 9.附加开环零点既能改善系统的稳定性,又能改善系统的动态性能。( )
A:错 B:对 10.引入等效单位反馈系统和等效传递函数的参数根轨迹绘制法则与常规根轨迹绘制法则完全相同。( )
A:对 B:错 1.频段分解分析具有很好的物理含义,每个频段担负的功能各异,某种意义上实现“功能解耦”分析。( )
A:错 B:对 2.一阶微分环节的对数幅频特性和相频特性与惯性环节的相应特性互以( )为镜像。
A:纵轴
B:横轴
C:45°
D:225°
3.若开环传递函数在右半s平面上有P个极点,则当ω由0变到+∞时,如果开环频率特性的轨迹在复平面上逆时针围绕(-1,j0)点转( )圈,系统是稳定的,否则,系统是不稳定的。
A:2P
B:0
C:P
D:P/2
4.I型系统的开环幅相频率特性曲线起始于( )。
A:坐标系负虚轴的无穷远处
B:坐标系正虚轴的无穷远处
C:坐标系正实轴的无穷远处
D:坐标系负实轴的无穷远处
5.已知单位反馈系统如图所示
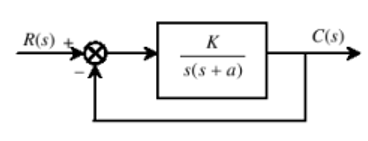
满足
 ,
, 的K值为( )。
的K值为( )。A:230
B:520
C:480
D:490
1.当根轨迹均位于s平面的左半平面时则系统( )。
A:无法判断
B:不稳定 C:稳定 2. 当开环传递函数n=3,m=2时,根轨迹条数( )。
A:3
B:5
C:2
D: 4
3.常规根轨迹实轴上是否有根轨迹判断的准则是该实轴右侧开环零极点个数之和为( )。
A:奇数
B:偶数
C:任意
4.合理增加开环偶极子可以提高系统的开环放大倍数。( )
A:对 B:错 5.参量根轨迹必须按常规根轨迹绘制法则进行绘制。( )
A:错 B:对 6.根轨迹上的点全部是闭环极点。( )
A:对 B:错 7.常规根轨迹与虚轴有交点意味系统可以产生等幅振荡。( )
A:错 B:对 8.在系统稳定的前提下,根轨迹的极点越远离虚轴系统的快速性越好。( )
A:对 B:错 9.当开环传递函数满足n-m≥2时,若一部分根轨迹分支向右移动,则必有一部分根轨迹分支向左移动。( )
A:错 B:对 10.增加开环极点将会使根轨迹的走向向左偏移,改善系统的相对稳定性。( )
A:错 B:对 1.若某系统的根轨迹有两个起点位于原点,则说明该系统( )。
A:含两个理想微分环节 B:速度误差系数为0
C:含两个积分环节
D:位置误差系数为0 2.若两个系统的根轨迹相同,则有相同的( )。
A:阶跃响应
B:闭环零点和极点 C:闭环极点 D:开环零点 3.若系统增加合适的开环零点,则下列说法正确的是 ( )。
A:可改善系统的快速性及平稳性;
B:可增加系统的稳定裕度。
C:会使系统的根轨迹向s平面的左方弯曲或移动;
D:会增加系统的信噪比;
4.根轨迹上的点应满足的幅角条件为
 ( )。
( )。A:-1
B:±(2k+1)π(k=0,1,2,…)
C:±(2k+1)π/2 (k=0,1,2,…)
D:1
5.若两个系统的根轨迹相同,则有相同的( )。
A:闭环零点和极点 B:闭环极点 C:开环零点 D:阶跃响应
6.设n和m分别是系统开环极点和零点的个数,当n-m>2时,当某些闭环极点在s平面上左移时,另外某些极点( )。
A:不动 B:向右移动 C:向上移动
D:向左移动 7.设n和m分别是系统开环极点和零点的个数(n>m),则会有n-m条根轨迹终于无穷远处。( )
A:错 B:对 8.闭环系统根轨迹增益等于开环系统前项通道根轨迹增益。( )
A:错 B:对 9.若相邻两极点间有根轨迹,则必有( )。
A:渐近线
B:分离点
C:起始角
D:终止点
10.开环传递函数为
 ,讨论p从0变到∞时闭环根轨迹,可将开环传递函数化为( )。
,讨论p从0变到∞时闭环根轨迹,可将开环传递函数化为( )。A:
 B:
B: C:
C: D:
D:
1.

A:




在系统中加入适当的开环零点或极点可以改善系统的稳态和动态性能,增加开环极点,根轨迹将向左偏移 ( )
A:对 B:错 3.

A:
-4
2
C:4
-2

A:对 B:错 5.

A:
3
不确定
2
1

A:
-3
0
-1.5
3

A:
(0,1]
B:(1,5]
C:(5,7]
D:(-∞,7]
8.
A:
0为起始点
B:
-1为起始点
C:-2为起始点
D:-3为起始点
9.
A:
2
1
3
4
根轨迹定义为闭环传递函数的某个参数,由0变化到无穷大时,系统的闭环特征根在S平面上的变化轨迹( )
A:错 B:对 1.在采用合适比例调节的控制系统中,现在比例作用基础上适当增加微分作用,则系统设定值阶跃响应的最大动态偏差会( )。
A:变小
B:变大
C:不变
2.某系统对象为0型,现在合适的比例作用基础上适当增加积分作用,则系统设定值阶跃响应的静态偏差会( )。
A:变大
B:变为0
C:变小
3.在采用合适比例调节的控制系统中,现在比例作用基础上适当增加积分作用,则系统设定值阶跃响应的调整时间会( )。
A:变小
B:变大
C:不变
4.在采用合适比例调节的控制系统中,现在比例作用基础上适当增加积分作用,为了得到相同的稳定性,则应当( )控制器的比例系数。
A:减小
B:不变
C:增加
5.对象为0型系统,增加控制器的积分时间常数Ti,则系统设定值阶跃响应的跟踪误差会( )。
A:变小
B:不变
C:变大
1.
已知某系统开环传递函数为

问系统有( )个开环极点,( )个开环零点。
A:4,0 B:4,1 C:0,4 D:1,4 2.
已知某系统开环传递函数为
![]()
开环极点分别是( )。
A:-1-j B:0 C:-1+j D:-3 3.
已知某系统开环传递函数为
有( )条分支,( )条渐近线。
A:4,4 B:2,2 C:3,3 D:1,1 4.
已知某系统开环传递函数为
( )是实轴上的根轨迹。
A:[0,正无穷) B:(负无穷,-3] C:[-3,0] 5.
已知某系统开环传递函数为
渐近线与实轴的夹角和交点分别为( )。
A:正负60度,180度,-3 B:正负135度,-1.25 C:正负45度,-3 D:正负45度,-1.25 6.
已知某系统开环传递函数为
分离点为( )。
A:-1.8 B:-2.3 C:-1 D:-4 7.
已知某系统开环传递函数为
起始角为( )。
A:正负121.5度 B:正负60度 C:正负71.6度 D:正负45度 8.
已知某系统开环传递函数为
与虚轴的交点为( )。
A:正负1.095j B:正负0.95j C:正负1.95j 9.
根轨迹上的点应满足的幅角条件为∠G(s)H(s)=( )
A:-180度 B:(2k+1)pi/2 C:180度 D:(2k+1)pi 10.
n-m=1时,开环极点之和=闭环极点之和=常数
A:错 B:对
温馨提示支付 ¥3.00 元后可查看付费内容,请先翻页预览!