第六章测试1.控制系统的基本的校正方式有( )
A:前馈校正
B:串联校正
C:局部反馈校正
D:复合校正
答案:ABCD
2.从频域角度,系统的串联校正方式主要有( )
A:超前校正
B:复合校正
C:滞后校正
D:滞后超前校正
3.超前校正的作用是( )
A:时间滞后
B:时间超前
C:提供超前相角
D:提供滞后相角
4.微分环节起到“提前预报”的作用。其作用的结果是使系统的超调减小,振荡减弱,过渡过程加快。( )
A:对 B:错 5.滞后校正能够在开环比例系数不降低的前提下,降低中频段和高频段的开环增益而不影响低频段。( )
A:对 B:错 1.关于系统频域校正,下列观点正确的是( )。
A:开环频率特性,在中频段对数幅频特性斜率应为
B:一个设计良好的系统,相角裕度应为45度左右
C:低频段,系统的开环增益主要由系统动态性能要求决定
D:利用超前网络进行串联校正,是利用超前网络的相角超前特性
2.下列串联校正装置的传递函数中,能在
 处提供最大相位超前角的是 ( )。
处提供最大相位超前角的是 ( )。A:
 B:
B: C:
C:
D:
 3.在系统中串联无源超前校正装置可以改善系统的动态性能。( )
3.在系统中串联无源超前校正装置可以改善系统的动态性能。( )A:对 B:错 4.无源滞后网络会增大系统的截止频率。( )
A:对 B:错 5.若已知某串联校正装置的传递函数为
则它是一种( )。
A:反馈校正 B:超前校正 C:滞后校正
D:滞后—超前校正 6.在系统校正时,为降低其稳态误差优先选用( )校正。
A:超前 B:滞后-超前 C:减小增益
D:滞后 7.采用超前校正对系统抗噪声干扰能力的影响是( )。
A:能力下降
B:能力不定
C:能力不变 D:能力上升 8.比例微分控制器中,微分时间常数越大,则系统的( )。
A:动态偏差越大
B:动态偏差越小 C:振荡越小 D:过渡过程缩短
9.由电子线路构成的控制器如图,它是( )。
A:超前—滞后校正装置
B:滞后校正装置
C:超前校正装置
D:滞后—超前校正装置
10.由基本功能组件并联成的PID控制器,其三种控制作用( )。
A:可以各自独立整定 B:不能独立整定
C:只有比例增益可独立整定
D:只有积分,微分时间可独立整定 1.零阶保持器不是零相位,会给系统带来额外的滞后相位。( )
A:错 B:对 2.时间函数
 的z变换为( )。
的z变换为( )。A:

B:

C:

D:

3.试用部分分式法求
 的z反变换为( )。
的z反变换为( )。A:
B:
C:
D:
4.
 的终值为( )。
的终值为( )。A:1
B:0
C:T
D:∞
5.开环离散系统如图所示

求开环脉冲传递函数为( )。
A:
B:
C:
D:
1.下列属于频域指标的是( )。
A:超调量
B:谐振峰值
C:过渡过程时间
D:衰减比
2.利用开环Bode图设计控制器的步骤中不包含( )。
A:比较固有部分Bode图与目标Bode图的差异,确定控制器的Bode图
B:绘制闭环系统Bode图
C:根据控制要求绘制期望的目标Bode图
D:绘制固有部分(被控对象)的Bode图
3.关于校正说法正确的是( )。
A:在被控对象不满足稳态精度的时候可以采用
B:当被控对象不满足控制要求时,通过附加控制器改变系统结构和参数,使闭环系统满足控制要求
C:可以改善系统的响应速度
D:只有在被控对象不稳定的时候才用
4.基本校正方式有( )。
A:局部反馈校正
B:串联校正
C:前馈校正
D:混合/复合校正
5.下列属于有源校正装置的是( )。
A:RC超前校正网络
B:气动PID控制器
C:RC网络与运算放大器组成的PID控制器
D:RC滞后校正网络
6.一般来说,下列说法错误的是( )。
A:谐振峰越大,超调越大
B:闭环截止频率越高,系统快速性越好
C:相角裕量越大,系统超调越大
D:闭环截止频率越高,系统快速性越差
7.超前校正中,关于超前校正环节(αTs+1)/(Ts+1)的参数计算说法正确的是( )。
A:先计算T再计算α
B:由超前角需要叠加的位置计算α
C:由需要提供的超前角度计算α
D:先计算α再计算T
E:由需要提供的超前角度计算T
F:由超前角需要叠加的位置计算T
8.滞后校正中,关于滞后校正环节(Ts+1)/( βTs+1)的参数计算说法正确的是( )。
A:由固有部分在目标截止频率处的幅值增益计算β
B:由目标截止频率位置选择T
C:由需要提供的滞后角度计算T
D:由需要提供的滞后角度计算β
9.关于超前校正说法正确的有( )。
A:可用来提高相角裕量
B:会造成截止频率后移
C:主要作用是提供超前相角
D:计算超前角需要留出裕量
10.关于滞后校正说法正确的有( )。
A:能够在保证低频增益的前提下降低截止频率
B:会造成截止频率后移
C:可以降低中频和高频段增益
D:可用来提高相角裕量
1.若已知某LTI系统的频率特性函数
 ,其输入为
,其输入为 ,则稳态输出为
,则稳态输出为 ( )
( )A:

B:

C:

D:

2.已知某最小相位系统的幅相曲线如图所示,
则其传递函数最有可能是( )。
A:
B:

C:
D:
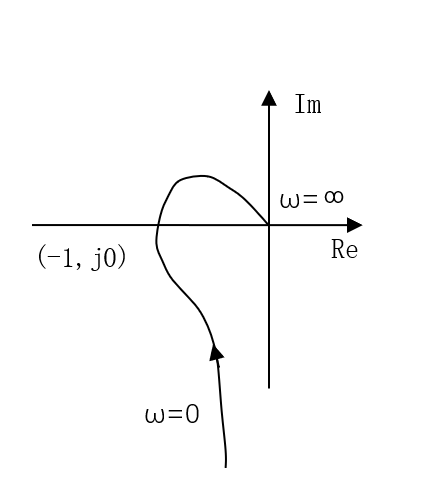
3.已知系统的开环频率特性的极坐标图如下图所示,
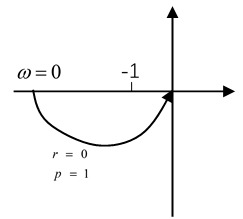
图中r是位于s平面原点的开环极点,p为位于右半s平面的开环极点数,则下面分析正确的是( )。
A:系统为0型系统,其闭环系统稳定。
B:系统为1型系统,其闭环系统不稳定
C:系统为0型系统,其闭环系统不稳定。
D:系统为1型系统,其闭环系统稳定。
4.已知系统的开环频率特性的极坐标图如下图所示,
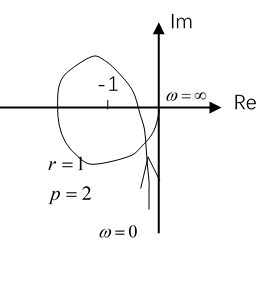
图中r是位于s平面原点的开环极点,p为位于右半s平面的开环极点数,则下面分析正确的是( )。
A:系统为2型系统,其闭环系统稳定。
B:系统为1型系统,其闭环系统稳定。
C:系统为2型系统,其闭环系统不稳定
D:系统为1型系统,其闭环系统不稳定。
5.已知系统的开环传递函数为
 ,当K=10时,其奈氏图如下图所示,
,当K=10时,其奈氏图如下图所示,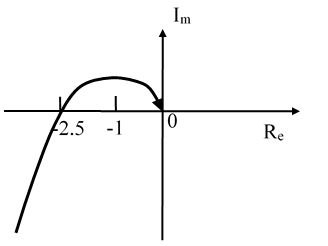
则下面分析正确的是( )。
A:该闭环系统稳定,且在K<11.5的范围内,系统都稳定。
B:该闭环系统稳定,且在K<25的范围内,系统都稳定。
C:该闭环系统不稳定,要系统稳定,则应为K<4
D:该闭环系统不稳定,要系统稳定,则应为K<8.5。
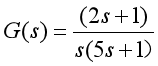
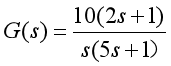
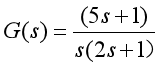
6.已知某最小相位系统对数幅频特性近似如下图所示,
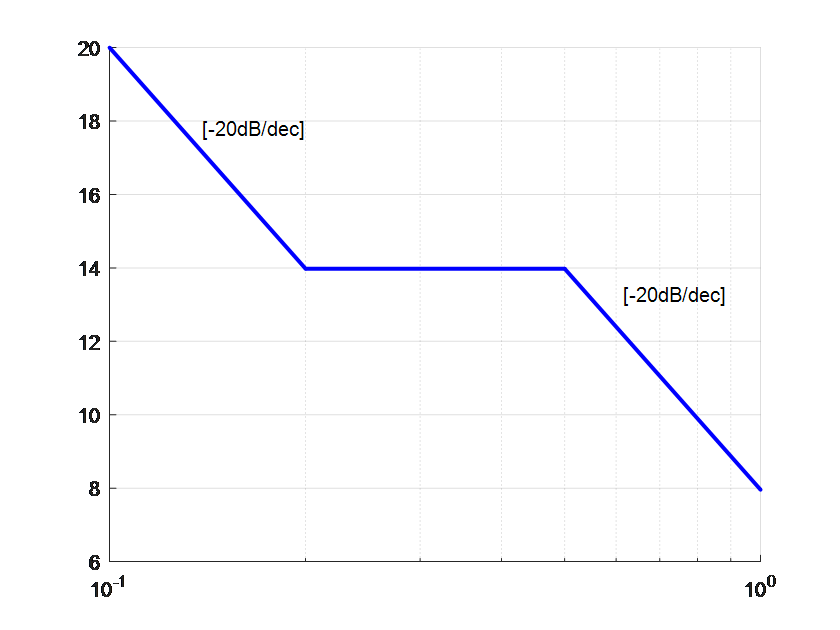
则其传函可能是( )
A:
B:
C:
D:
7.某最小相位系统传递函数为
 ,则当
,则当 时,其对数幅频特性渐近线方程为( )
时,其对数幅频特性渐近线方程为( )A:
B:
C:
D:
8.某最小相位系统传递函数为
,则当 时,其相频特性方程为( )
时,其相频特性方程为( )A:
B:
C:
D:
9.
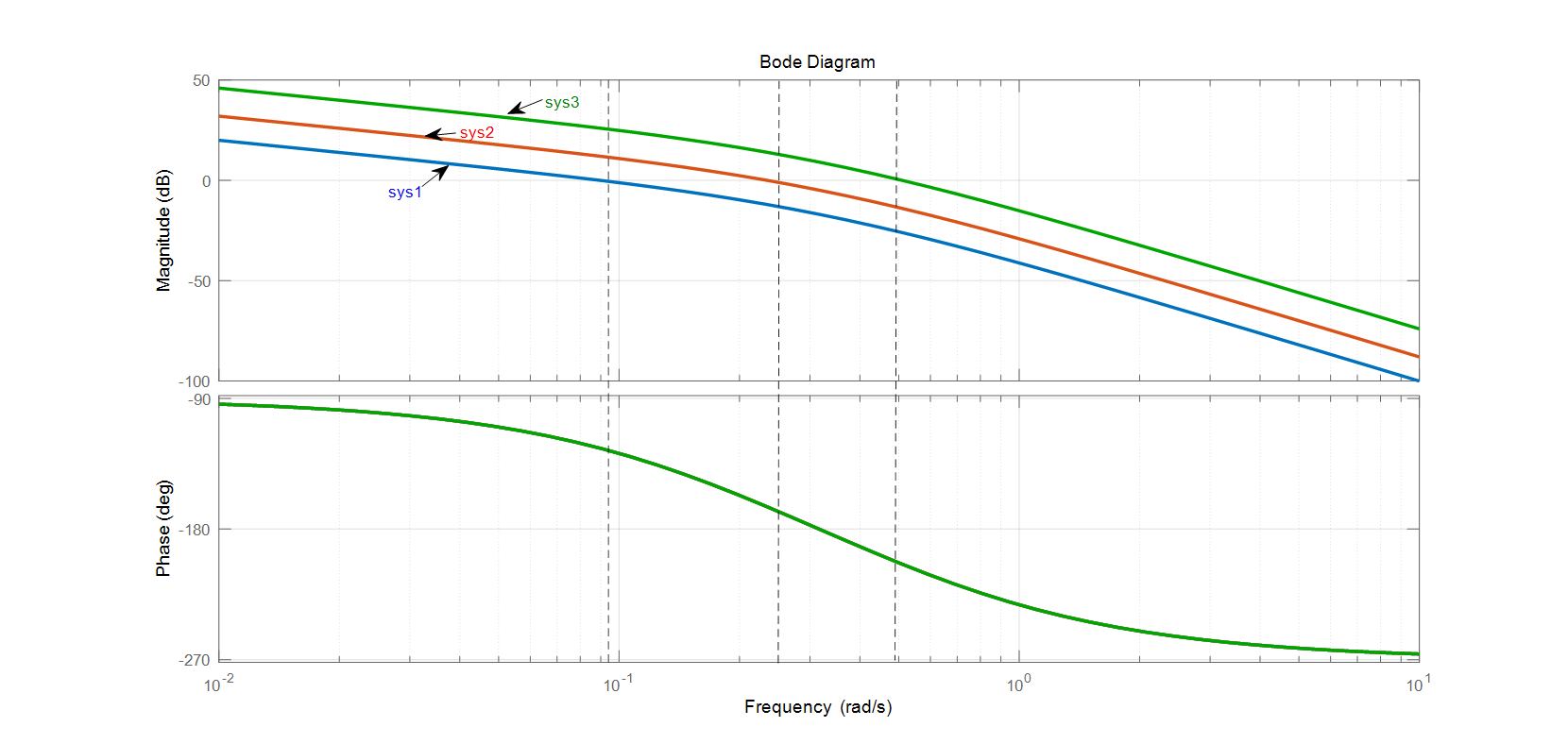
已知某三个控制系统的伯德图如上图所示,则有( )。
A:
B:
C:
D:
10.某系统伯德图如图所示,
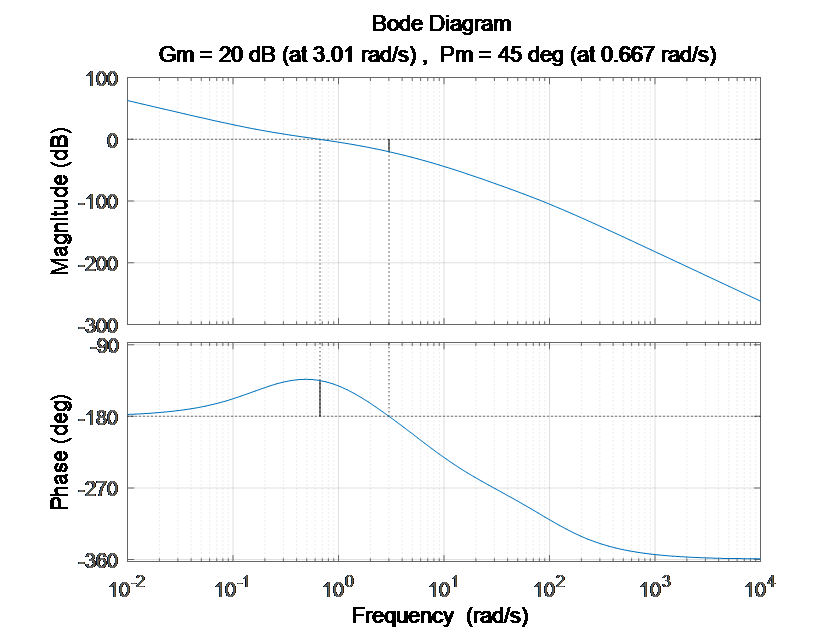
原系统剪切频率
 ,相位裕量为
,相位裕量为 ;相位穿越频率
;相位穿越频率 ,增益裕量为
,增益裕量为 ,在此基础上系统增益K增大为原来的2倍,则下列说法正确的是( )。
,在此基础上系统增益K增大为原来的2倍,则下列说法正确的是( )。A:增加K之后,系统的相位穿越频率ωg不变,增益裕量减小为
 。
。B:增加K之后,系统的相位穿越频率ωg会增加,增益裕量会减小。
C:增加K之后,系统的剪切频率ωc不变,相位裕量减小为
 。
。D:增加K之后,系统的相位穿越频率ωg不变,增益裕量减小为
 。
。E:增加K之后,系统的剪切频率ωc会增加,相位裕量会减小。
1.单位负反馈系统型数为2,闭环幅频特性的零频值为( )。
A:无穷大
B:0
C:2
D:1
2.截止频率处,闭环幅频特性的幅频值为( )。
A:-3 dB
B:-4 dB
C:3 dB
D:4 dB
3.不属于时域内性能指标的是( )。
A:超调量
B:幅值裕量
C:峰值时间
D:调整时间
4.频率法超前校正中,相位超前角30度,控制器传递函数在wm处的幅值为( )。
A:-6.2
B:-4.77
C:6.2
D:4.77
5.
滞后超前校正系统传递函数,博德图有( )转折频率。
A:2
B:3
C:无正确答案
D:4
6.PI控制器能稳态精度,动态性能。( )
A:无正确答案
B:提高,恶化
C:提高,改善
D:降低,恶化
7.一般来说,下列说法错误的是 ( )
A:闭环截止频率越高,系统快速性越差
B:谐振峰越大,超调越大。
C:相角裕量越大,系统超调越大。
D:闭环截止频率越高,系统快速性越好。
8.
滞后校正中,关于滞后校正环节(Ts+1)/(βTs+1)的参数计算说法正确的是: ( )
A:由目标截止频率位置选择T。
B:由需要提供的滞后角度计算β。
C:由固有部分在目标截止频率处的幅值增益计算β。
D:由需要提供的滞后角度计算T
9.
超前环节相角一定大于0。( )
A:错 B:对 10.
比例微分控制律的相角是滞后的。 ( )
A:错 B:对 1.用频率法设计串联校正装置时,采用串联滞后校正网络是利用其高频幅值衰减特性。( )
A:错 B:对 2.用频率法设计串联校正装置时,采用串联超前校正网络是利用其最大超前角来增大系统的相角裕度。( )
A:对 B:错 3.PD校正使系统增加了一个[s]左半平面的开环零点,将使系统的稳定性和快速性得到改善。( )
A:对 B:错 4.PI校正通过引入积分环节可使系统的型别(即无差度)提高,改善系统的稳态精度;但是会引起-90°的相移,不利于稳定性。( )
A:对 B:错 5.PID控制器参数的选择顺序是( )。
A:比例系数→积分系数→微分系数
B:积分系数→比例系数→微分系数
C:比例系数→微分系数→积分系数
D:微分系数→比例系数→积分系数
6.
分析法串联超前校正主要作用在原系统的( ),作用方式是利用校正装置的相位超前特性,产生足够大的超前相角,以补偿原系统过大的滞后相角。
A:低频段
B:中频段
C:高频段
D:不能确定
7.控制系统的频率法串联校正一般包括( )。
A:串联超前校正
B:串联滞后校正
C:串联滞后-超前校正
D:串联反馈校正
8.下列关于校正装置的说法正确的是( )。
A:相位超前校正是利用超前校正装置的相位超前特性来提高系统的相角裕度,改善系统的动态性能
B:串联滞后校正是利用滞后校正装置的高频衰减使系统的截止频率下降,相角裕度增加,减小系统的超调量
C:串联滞后校正牺牲了系统的快速性。
D:串联超前校正的缺点是会使系统的抗高频干扰能力变差
9.
下列关于分析法串联超前校正对系统性能影响说法正确的是( )。
A:可提高系统的响应速度,但影响了系统的稳态性能
B:其余说法都不对
C:不能提高系统的响应速度,不影响系统的稳态性能
D:能够提高系统的响应速度,但不影响系统的稳态性能
10.下列关于串联滞后校正的说法正确的是( )。
A:增加了系统的开环放大系数,从而增加了系统的稳态误差
B:其余说法都不对
C:减小了系统的开环放大系数,从而减少了系统的稳态误差
D:在保持开环放大系数不变的情况下,减小了截止频率,增加了相角裕度
1.
线性系统的运动过程(输出),与系统的初始状态无关,而非线性系统的运动过程(输出)与系统的初始状态有关。
A:对 B:错 2.
非线性系统可能存在的平衡状态中,有的是稳定的,有的可能是不稳定的。
A:错 B:对 3.
非线性系统可分为时变系统和定常系统。
A:错 B:对 4.
非线性系统若存在稳定的极限环,系统可以产生稳定的自激振荡。
A:对 B:错 5.
线性系统和非线性系统的稳定性与系统的结构参数,初始状态,输入等因素有关。
A:错 B:对 1.
常用的时域性能指标有( )
A:
幅值裕度
B:超调量
C:稳态误差
D:调节时间
2.常用的频域性能指标有( )A:相角裕度 B:闭环带宽 C:峰值时间 D:谐振峰值 3.校正方式包括( )
A:前馈校正 B:反馈校正 C:串联校正 D:复合校正 4.选择系统带宽时,应使得系统的带宽频率包含输入信号的带宽。
A:错 B:对 5.
采用积分控制器,使信号产生了90°相角滞后,会增加系统的稳定性。
A:错 B:对 6.微分控制律能够增加系统的阻尼程度,使系统变得不稳定。
A:错 B:对 7.无源超前网络具有最大超前角。
A:错 B:对 8.
使用无源超前网络进行串联校正时,需要提高放大器增益,以补偿开环增益的下降。
A:对 B:错 9.在系统中串联无源校正网络时,可以改善系统的动态性能和稳定性。
A:错 B:对 10.无源滞后超前网络在低频段具有相位超前特性,在高频段具有相位滞后特性。
A:错 B:对 1.非线性系统
 ,当输入信号
,当输入信号 时,系统( )。
时,系统( )。A:半稳定 B:临界稳定 C:稳定 D:不稳定 2.用等倾线法绘制相轨迹图一般适用于等倾线为( )的情形。
A:双曲线 B:圆 C:直线 D:抛物线 3.某非线性系统的相轨迹在某一区内以对数螺线形式收敛于某一奇点,则该系统的单位阶跃响应呈现( )。
A:等幅振荡 B:欠阻尼状态 C:过阻尼状态 D:临界阻尼状态 4.当非线性环节的描述函数N(A)为实函数时,该非线性环节的输入信号和一次谐波输出( )。
A:有相差,但相差小于90° B:相差90° C:反相位 D:同相位 5.
描述函数法主要用来确定非线性系统自持振荡的( )。
A:形式和次数 B:振幅和时间 C:振幅和频率
温馨提示支付 ¥3.00 元后可查看付费内容,请先翻页预览!