第二章测试1.串联机器人,一个轴的运动不会改变另一个轴的坐标原点。
A:错 B:对
答案:A
2.串联机械手是一种开式运动链机器人,它是由一系列连杆通过转动关节或移动关节串联形成的姿态。
A:错 B:对 3.串联机器人中,小型机器人定义的臂长是小于1m,负载是小于10kg
A:错 B:对 4.串联机器人常见安装方式有哪几种?
A:墙装 B:倒装 C:地装 D:斜装 5.依据技术指标进行串联机器人选型的时候初步选择有哪些?
A:节拍时间 B:精度 C:作业空间 D:荷重 1.一矢量
 绕
绕 旋转
旋转 度,然后绕
度,然后绕 旋转
旋转 度,求按上述顺序旋转后得到的旋转矩阵为( )。
度,求按上述顺序旋转后得到的旋转矩阵为( )。 A:

B:
C:
D:
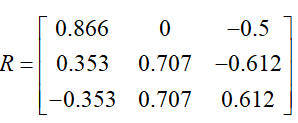
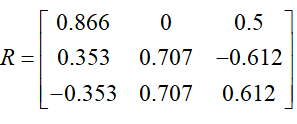
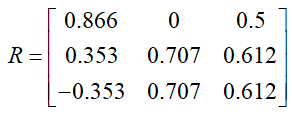
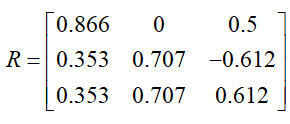
2.一矢量
 绕
绕 旋转30度,然后绕
旋转30度,然后绕 旋转45度,求按上述顺序旋转后得到的旋转矩阵( )。
旋转45度,求按上述顺序旋转后得到的旋转矩阵( )。 A:
B:
C:
D:
3.坐标系{B}最初与坐标系{A}重合,将坐标系{B}绕
 旋转
旋转 度,接着再将上一步旋转得到的坐标系绕
度,接着再将上一步旋转得到的坐标系绕 旋转
旋转 度,求从
度,求从 到
到 矢量变换的旋转矩阵为( )。
矢量变换的旋转矩阵为( )。 A:

B:

C:

D:

4.坐标系{B}最初与坐标系{A}重合,将坐标系{B}绕
 旋转30度,接着再将上一步旋转得到的坐标系绕
旋转30度,接着再将上一步旋转得到的坐标系绕 旋转45度,求从
旋转45度,求从 到
到 矢量变换的旋转矩阵( )。
矢量变换的旋转矩阵( )。 A:
B:
C:
D:
5.两个有限旋转矩阵可以交换的条件是( )。
A:任何条件下都不可交换
B:当这两个旋转是绕着同一个坐标轴转动时
C:当这两个旋转的旋转角度小于等于90°时
D:当这两个旋转所绕的坐标轴是互相正交时
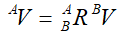
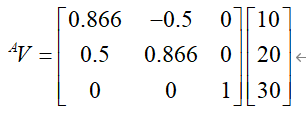
6.已知一速度矢量为
 ,又已知
,又已知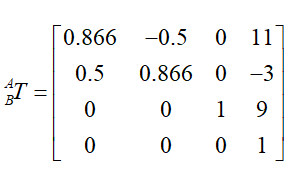 ,下列计算
,下列计算 不正确的是( )。
不正确的是( )。 A:

B:
C:
D:

7.
关于旋转矩阵和齐次矩阵,下列不正确的是( )。
A:齐次矩阵的行列式可能不等于1
B:齐次矩阵的逆矩阵等于该矩阵的转置
C:旋转矩阵的逆矩阵等于该矩阵的转置
D:
旋转矩阵的行列式等于1
8.关于齐次矩阵 ,下列表述不正确的是( )。
,下列表述不正确的是( )。 A:

B:
C:
D:
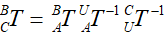
9.
已知坐标系{B}相对于坐标系{A}的齐次变换阵。已知 ,求
,求 ,下列说法正确的是( )。
,下列说法正确的是( )。
A:
B:
C:
 D:
D:
10.
圆柱坐标系的三个坐标参数定义见下图,坐标 给定xy面内的有向线段,r表示沿着这个方向的径向长度,z给定了在xy平面上的高度,由圆柱坐标系,r和z来计算笛卡尔坐标系中的一个点
给定xy面内的有向线段,r表示沿着这个方向的径向长度,z给定了在xy平面上的高度,由圆柱坐标系,r和z来计算笛卡尔坐标系中的一个点 结果正确的是( )。
结果正确的是( )。

A:




温馨提示支付 ¥3.00 元后可查看付费内容,请先翻页预览!