第三章测试1.并联机器人,一个轴的运动不会改变另一个轴的坐标原点。
A:错 B:对
答案:B
2.并联机械手采用了一种闭环机构,一般由上下运动平台和两条或者两条以上运动支链构成。
A:错 B:对 3.相比串联机器人,并联机器人的特点是?
A:需要减速器 B:逆解简单 C:电机位于机架,惯量小 D:驱动功率不同,电机型号不一 4.常见的并联机器人有哪几种?
A:柔索牵引 B:delta C:Swewart D:平面并联 E:球面并联 5.柔索牵引并联机器人可分为哪几种类型?
A:冗余约束定位机构 B:欠约束定位机构 C:完全约束定位机构 D:反约束定位机构 1.任意刚体的坐标变换都可以按照方程
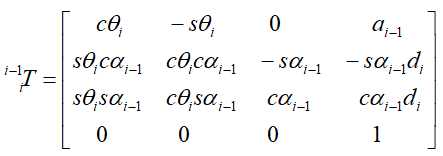 的形式用四个参数
的形式用四个参数 来描述。( )
来描述。( )A:错 B:对 2.下列关于机器人空间的说法错误的是( )。
A:机器人每个运动关节都是直接由某个驱动器来直接驱动的
B:驱动机器人关节运动的驱动器矢量所组成的空间称为驱动器空间
C:机器人所有关节矢量组成的空间称为关节空间
D:器人的笛卡尔空间,有时也称为任务空间和操作空间
3.如果我们能够得到机器人关节位置传感器的值,机器人末端连杆在笛卡尔坐标系里的位置和姿态可以通过
 来计算。( )
来计算。( )A:对 B:错 4.由于机器人的结构是确定的,连杆长度、连杆扭角等参数都是已知的,所以机器人连杆变换矩阵
 的参数是线性时不变的。( )
的参数是线性时不变的。( )A:对 B:错 5.
如下图(a)所示两连杆机器人,下图(b)给出了连杆坐标系的布局。当 时,坐标系{0}和坐标系{1}重合。第二个连杆长度为
时,坐标系{0}和坐标系{1}重合。第二个连杆长度为 。
。 已知连杆的坐标变换矩阵为
已知连杆的坐标变换矩阵为 ,则
,则 相乘的结果为
相乘的结果为 。
。
A:对 B:错 6.
参考题5中所描述的机器人,求其末端相对于坐标系{0}的矢量表达式为( )
A:




如图所示为三自由度机械臂,其中关节轴1余另外两轴不平行,轴1与轴2夹角为90°,则该机械臂的 为
为

A:




如图所示为三自由度机械臂,其中关节轴1余另外两轴不平行,轴1与轴2夹角为90°,则该机械臂的 为( )。
为( )。

A:




如图所示为三自由度机械臂,其中关节轴1余另外两轴不平行,轴1与轴2夹角为90°,则该机械臂的  为( )。
为( )。
A:




如图所示为三自由度机械臂,其中关节轴1余另外两轴不平行,轴1与轴2夹角为90°,则该机械臂的  为( )。
为( )。

A:




温馨提示支付 ¥3.00 元后可查看付费内容,请先翻页预览!