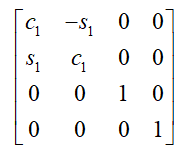
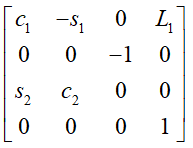
第四章测试1.如图所示为三自由度机械臂,其中关节轴1余另外两轴不平行,轴1与轴2夹角为90°,已知该机械臂的末端的位置姿态,则
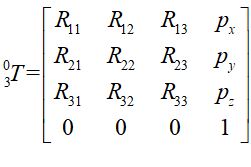 。求该机械臂的末端连杆变换矩阵
。求该机械臂的末端连杆变换矩阵 为( )。
为( )。 A:
B:

C:
D:
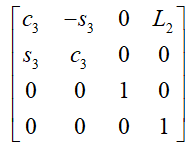
答案:B
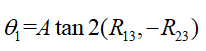
2.求出该机械臂的运动学逆解,
 为( )。
为( )。 A:

B:

C:
D:

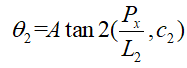
3.求出该机械臂的运动学逆解,
 为( )。
为( )。 A:
B:
C:
D:
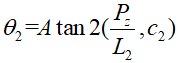
4.求出该机械臂的运动学逆解,
 为( )。
为( )。 A:

B:

C:

D:

5.已知一个三连杆平面旋转关节机械臂手部的期望位姿,有两个可能的逆解。如果再加入一个旋转关节(在此情况下该机械臂仍然为平面机械臂),此四连杆平面机械臂将会有多少个解?( )。
A:2
B:无穷多
C:4
D:3
6.三自由度的机器人一定有封闭形式的解析解。( )
A:对 B:错 7.一般情况下,封闭形式的解析解优于迭代求出的数值解。( )
A:错 B:对 8.PIEPER条件证明了三轴相交的机器人一定存在解析解,但没有给出解析解的具体求取方法。( )
A:对 B:错 9.机器人的逆解存在多解的情况下,需要选择最短行程解作为最终的解。( )
A:对 B:错 10.几何解法计算量小,所以几何解法优于代数解法。( )
A:对 B:错 1.()是整个机器人的支持部分,有固定式和移动式两类
A:手部 B:腕部 C:手臂 D:机座 2.工业机器人的腕部是手部和手臂之间的连接部件,一般采用()自由度多关节结构
A:4 B:3 C:5 D:2 3.驱动器选择应考虑()成本以及其他因素
A:定位精度 B:运动速度 C:可靠性 D:负载大小 4.实现机器人回转机构的运动形式多种多样,常用的有()
A:齿轮机构 B:叶片式回转缸 C:链轮传动机构 D:齿轮传动机构 5.驱动电动机一般采用步进电机,直流4V电动机,交流4V电动机。
A:错 B:对
温馨提示支付 ¥3.00 元后可查看付费内容,请先翻页预览!