第五章测试1.力域中的奇异位形与位置域中的奇异位形相同。( )
A:对 B:错
答案:A
2.如果一个3自由度机械臂,它的雅可比矩阵是一个3×3的单位阵,则该机械臂具有如下结构( )。
A:该机械臂具有3个满足PIEPER条件的关节轴
B:该机械臂具有3个移动关节,且3个移动关节正交
C:该机械臂具有3个转动关节,且3个转动轴正交
D:不可能存在这样的机械臂
3.在奇异位形,雅可比矩阵的逆不存在。( )
A:错 B:对 4.当机械臂接近奇异位形时,关节速度会趋向于无穷大。( )
A:错 B:对 5.当机械臂接近奇异位形时,关节力矩会趋向于无穷大。( )
A:对 B:错 6.一个RP机械臂,连杆2的原点位置为
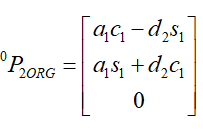 ,则该机械臂有两个关节变量,分别是( )。
,则该机械臂有两个关节变量,分别是( )。 A:

B:

C:

D:

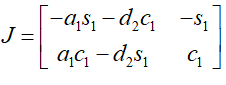
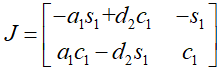
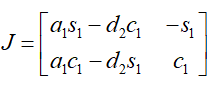
7.一个RP机械臂,连杆2的原点位置为
,则该机械臂的雅克比矩阵是( )。 A:
B:
C:
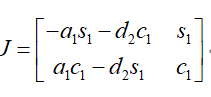
D:
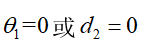
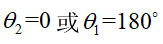
8.一个RP机械臂,连杆2的原点位置为
,则该机械臂的奇异位形是( )。 A:

B:

C:

D:
9.第9题所示机械臂,如果有奇异位形,则该奇异位形在什么位置?( )。
A:
B:
C:
D:
10.
如下图所示两连杆机械臂,存在奇异位形吗( )。

A:不存在 B:
存在
C:不一定,是否存在奇异位形与两个连杆的长度相关。
A:温度传感器 B:光电编码器 C:速度传感器 D:压力传感器 2.常见加速度传感器有()
A:应变式 B:电感式 C:压电式 D:电容式 3.绝对型光电编码器的工业机器人其关节不需要校准
A:错 B:对 4.超声波传感器不能用于检测距离小于30-50cm 的距离
A:对 B:错 5.位置传感器用于反馈机器人的直线位移和角位移
A:对 B:错
温馨提示支付 ¥3.00 元后可查看付费内容,请先翻页预览!